| ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса - ваш вокал Игровые автоматы с быстрым выводом Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Вкуснейший "Салат из свеклы с чесноком" Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека - Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
| Курс саясаты мен процедурасы. 9 страница
Моменттер мен жылдамдықтар таңбасы әртүрлі болатындықтан механикалық сипаттамалар Моменттер актив және реактив моменттерге бөлінеді. Актив моменттер қозғағыш та, тежегіш те болуы мүмкін. Олардың бағыттары, қозғалыс бағытына тәуелсіз болады, мәселен 5.,4 суреттегі электрлік машинаның М-моменті. Механикалық сипаттамалар кез-келген квадратына орналасуы мүмкін.
Механикалық сипаттамалар қатаңдығы бойынша бағаланады. Қатаңдық формуласы: 1. 2. абсолют жұмсақ 3. 4.
координаталарын анықтауға мүмкіндік туғызады. Шындығында да егер wуст и Муст. Мс сипаттамасын сол күйінде бірінші квадрантқа көшірсек (5.6,а - сурет), онда А М – қозғалтқышының, тұрақталған режімдегі сипаттамасын анықтайды, өйткені мына шарт орындалады. М+(-Мс)= 0 немесе
а) б) 5.6 сурет. Тұрақталған режимді анықтау. 5.6 суретте біз Мс моментін екінші квадранттан бірінші квадрантқа көшірдік. (5.1) формуласын мына түрде жазсақ бұл операцияны жасамауға болады:
мұндағы “-” таңбасы жүктеме сипаттамасын ауыстыруды көрсетеді. Қозғалтқыш пен жүктеменің механикалық сипаттамалары тұрақталған режімнің статикалық тұрақты болатындығын немесе болмайтындығын көрсетеді. Яғни жүйеге кездейсоқ әсер болғанда ол өзінің бастапқы тұрақтанған (статикалық) жағдайына келеді ма (5.7 – а- сурет) әлде келе алмайды ма (5.7-б- сурет) – осыны анықтауға мүмкіндік береді.
а) б) 5.7 сурет. Статикалық тұрақтылықты анықтау
5.7-а суретте жылдамдықты төмендеткенде (w1 < wуст) М момент Ме моментінен үлкен болғандықтан тепе-теңдік қалпына келеді. Ал 5.7-б-суретте керісінше Ме моментінің шамасы көп болғандықтан тепе-теңдік сақталмайды, яғни жүйе статикалық тұрақсыз болып есептеледі. Моменттер мен инерция моменттерін келтіру Әдетте қозғалтқыш пен жүктеме арасында қандай да бір механикалық беріліс болады, яғни өз моменттері мен жылдамдықтары бар бірнеше біліктер болуы мүмкін. Кез-келген нақты жүйені қарапайым моделге келтіру (сәйкестендіру) үшін (5.2- сурет) бірнеше операциялар орындау қажет. Бұл операциялар моменттер мен инерция моменттерін негізгі деп таңдалған білікке келтіру деп аталады. Басқаша айтқанда қандай да бір нақты механикалық жүйені(мәселен, 5.8а-суретте көрсетілген) оған балама жүйемен ауыстыру қажет.(5.8 б –суретте көрсетілген). Бірақ бұл ауыстыру жүйенің өзгермей қалған бөлігіне кері әсерін тигізбеуі керек.
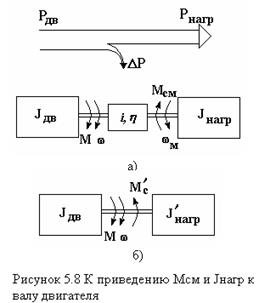
Мынадай тұжырымдар қабылдайық: жүйе қуыссыз,қатаң; негізгі білікке қатысты инерция моменттері-өзгеріссіз,ал аралық біліктердегі инерция моменттері нөлге тең Нақты жүйеде де келтірілген жүйеде де қозғалтқыш жасайтын қуат
осыдан
Шығындар жүйенің қозғалыс жасайтын бөлігімен жабылып отырады. Сондықтан қуатты кері ағыны (жүктемеден қозғалтқышқа) кезінде
Нақты және келтірілген жүйелерде кинетикалық энергия қоры бірдей болуы шарт,яғни
немесе
Қарапайым болы үшін берілістегі шығындар ескерілмейді. Бұл айтарлықтай ауытқулар – туғызбайды. Негізгі әдебиет: 9 [16-22] Бақылау сұрақтары: 1. Электржетегінің механикалық бөлігінің моделін келтіріңіз. 2. Электржетектің қозғалыс теңдеуі қандай, оған анализ жасаңыз. 3. Қозғалтқыш пен жүктеменің механикалық сипаттамалары бойынша электржетектің статикалық және динамикалық режімдерінің анализі қалай жасалады? 4. Қозғалтқыш пен жүктеменің механикалық сипаттамаларының көмегімен режімнің статикалық тұрақтылығы қалай анықталады? 5.Жүйе моменттері мен инерция моменттері қозғалтқыш білігіне қалай келтіріледі? № 20 дәріс конспекті Дәріс тақырыбы: ЭЖ координаталарын реттеу. Реттелетін АЭЖ-ның негізгі техникалық – экономикалық көрсеткіштері. Тұрақты және айнымалы ток қозғалтқыштарын реттеу тәсілдері, өнеркәсіптік механизімдер үшін эж жүйесін таңдау. Жетектерді басқарудың релелік-контакторлық схемалары. ЭЖ координаталарын реттеу. ЭЖ координаталарын басқарудың өте маңызды бір жағдайы – жылдамдық пен моментті тұрақтанған режімде технологиялық процесс талаптарына сәйкс қозғалтқыштың механикалық сипаттамаларына әсер ету арқылы реттеу. Бір координатының тәуелсіз өзгеруі кезінде екінші координатаны талап етілген деңгейде ұстап тұру – реттеудің жеке жағдайы болып табылады.Көп жағдайларда реттелетін шама ретінде жылдамдық алынады. Мәселен, қозғалыс жағдайына байланысты көлік жылдамдығын өзгерту, қажетті арынды қамтамасыз ету үшін сорап жылдамдығын реттеу т.б. «Жылдамдықты реттеу» ұғымын әртүрлі сипаттамалар қолданылған кезде (5.9а- сурет) жылдамдықты реттеу мен шатастырмау керек. Жылдамдықты өзгерту жүктемесні көбейту немесе азайту арқылы жүзеге асырылады, және берілген механикалық сипаттама пішініне сәйкес жүреді (5.9б-сурет).
а) б) 5.9-сурет. Жылдамдықты реттеу (а) және өзгерту (б)
Кейбір жағдайларда моментті де реттеу қажет болады. Мәселен, ұстыннан шығып жатқан сымды катушкаға сапалы орау, кемені сүйреу кезінде тростың үзілуін болдырмау үшін және т.б. Бірақ біз негізінен жылдамдықты реттеуді ғана қарастырамыз. Жылдамдықты реттеу механикалық сипаттамалардың бағыттық сипаттаманы негізгі ретінде қабылдаймыз. Әдетте негізгі сипаттама ретінде табиғи сипаттама алынады. Табиғи сипаттама деп қозғалтқыштың номинал шамалармен (кернеу, жиілік, магнит ағыны т.б.) жұмысы кезінде алынған сипаттаманы айтады. Жылдамдықты реттеу мақсатымен жасалынатын барлық сипаттамаларды жасанды сипаттамалар деп атаймыз. Олар әртүрлі тәсілдермен жасалуы мүмкін және төменде көрсетілген техникалық-экономикалық көрсеткіштері бойынша сан алуан болады: 1. Реттеу бағыты. Табиғидан төмен орналасқан жасанды сипаттамалар-негізгі жылдамдықтан төмен бірзоналық реттеу, табиғидан жоғары орналасқан жасанды сипаттамалар-негізгі жылдамдықтан жоғары бірзоналық реттеу, табиғидан жоғары және төмен орналасқан сипаттамалар-екізоналық реттеу деп аталады. 2. Реттеу диапазоны-жүктеме моментінің берілген өзгерістері кезіндегі максимал жылдамдықтың минимал жылдадыққа қатынасы (5.10 сурет).
Табиғи сипаттамасы мен
а) б) 5.10 сурет. Жылдамдықы реттеу диапазонын анықтау.
Сипаттамалар қатаңдығымен тағы да бір көрсеткіш-жасанды сипаттамалардағы жылдамдық орнықтылығы-бай»ланысты болады. Ол төмен (5.10, а - сурет) және жоғары (5.10,б-сурет) болуы мүмкін. Кейде абсолют қатаң ( 3. Реттеу жатықтылығы. Жасанды сипаттамаларды қалаған жақындықта орналастырып алу мүмкін болса-жатық реттеу, ал керісінше тек бірнеше белгіленген сипаттамалар ғана алу мүмкін болса-сатылы реттеу деп аталады. 4. Жасанды сипаттамалардағы рұхсат етілген жүктеме- ЭЖ сенімділігін сипаттайтын өте маңызды көрсеткіш. Табиғи сипаттамадағы рұхсат етілген жүктеме-қозғалтқыштың номинал моменті, Мн. Ал рұхсат етілген ток-қозғалтқыштың номинал тогы Iн. Сонда мәжбүрлеп салқындатылатын қозғалтқыш үшін рұхсат етілген момент мынаған тең:
Яғни бұл момент сәйкес жасанды сипаттамадағы қозғалтқыштың магнит ағынына тәуелді болады. Ф = Фн = const болатын реттеу кезінде Мдоп º IнФн = Мн. 5. Реттеу үнемділігі реттеу тәсілінқолданған кездегі энергия шығындарымен бағаланады. Кейде үнемділікті бағалау үшін пайдалы қуатты
Бұл тәсіл жалпылама бағалау тәсілі болып есептеледі. Реттеу үнемділігін дәлірек бағалау үшін әртүрлі тәсілдер салыстырылып, циклдік ПӘК
яғни tц циклінің уақытында жетек жұмысының нақты жағдайлары ескеріледі. 6. Реттеуге кететін жұмсалымдарды реттеуді жүзеге асыру үшін пайдаланылған қосымша жабдықтың құны Соб деп анықтауға болады. Жұмысалымдар тиімділігін оның құнының қайту мерзімімен Ток бағалаған тиімді:
мұндағы Цгод.эфф- реттеуді пайдаланудан түсетін жылдық тиімділік бағасы. Жоғарыда келтірілген реттеудің алты көрсеткіші басты ерекшеліктерді салыстыру мен әртүрлі тәсілдерді салыстыруға мүмкіндік береді. әрине, кең диапазонда жатық екізоналық реттеуді жүзеге асратын, тұрақты рұхсат етілген жүктемесі Мдоп » Мн, шығыны аз, қосымша жабдықтарының құны төмен реттеу жүйесі боса, идеалды тәсіл болар еді. Бірақ мұндай идеал тәсіл болмағандықтан инженер әртүрлі жағдайларды ескере отырып тиімділікті қамтамасыз ететін мүмкіндіктер таңдайды. Соңғы кезде «баға/сапа» көрсеткіші кең қолданылып жүр. Негізгі әдебиет: 9 [23-26] Бақылау сұрақтары: 1. ЭЖ координаталарын реттеу ұғымының мәні неде? 2. ЭЖ-ның жасанды сипаттамаларын атаңыз және қысқаша түсінік беріңіз? 3. Реттеу диапазоны қалай анықталады? 4. Реттеу үнемділігін жалпы және дәл бағалау қалай жүргізіледі? 5. Реттелмейтін ЭЖ-ны реттелетін ЭЖ-мен ауыстыру кезіндегі жұмсалымның орнын толтыру мерзімі қалайша анықталады?
№ 21 дәріс конспекті Дәріс тақырыбы: Электромеханикалық жүйелердің энергетикасы, энергия шығындары мен реактивқуатты тұтыну, шығындарды төмендету тәсілдері. ЭЖ-ның жұмыс режімдері, ұзақ уақыттық, қысқа уақыттық және қайталанбалы қысқа уақыттық жұмыс режімдері үшін қозғалтқыш қуатын таңдау. Жалпы мәліметтер. ЭЖ-ның негізгі қызметі – электр энергиясын механикалық энергияға түрлендіру және осы процент басқару. Осыған байланысты ЭЖ-ның энергетикалық көрсеткіштері мен сипаттамаларының мәні өте зор. Энергияның түрленуі кезінде әртүрлі шығындар болады, яғни кіріс қуаты Рвх әрқашан шығыстық қуаттан Рвых қандай да бір ΔР шамасына (шығын шамасына) артық болады. ΔРшамасының қаншалықты үлкен екендігі де үлкен маңызға ие. Берілген моменттегі процестің энергетикалық тиімділігі әдетте ПЭК арқылы бағаланады:
ЭЖ-ның негізгі бөліктерінің маңызды энергетикалық сипаттамасы ретінде номинал ПЭК алынады.
мұндағы Рном,, ΔРном — номинал шығыстық қуат пен номинал шығындар. ПӘК-тің салыстырмалы жүктемеге тәуелділігі ЭЖ-ны қоректендіретін линиядағы кернеу мен ток фаза бойынша сәйкес келмегенде және ол синусоида пішінді болмағанда тағы да бір энергетикалық сипаттама – қуат коэффициент қолданылады. Үшфазалы линия үшін ол былайша анықталады:
мұндағы Р — актив қуат; Ауытқулар аз болғанда
Тұрақтанған режімдегі шығындар. Машинадағы шығындардың негізгі құрамдамалары: - орауыштардағы шығындар (мыстағы шығындар); - магнит өткізгішіндегі шығындар (болаттағы шығындар); - үйкелмелі бөліктердегі шығындар ұмеханикалық шығындар). Реттелмейтін ЭЖ-да Сонымен реттелмейтін ЭЖ үшін бірінші жақындау кезінде мынадай деп есептеуге болады:
мұндағы Нақты түсінікті 5.11-суреттей диаграммадан көруге болады. Онда электр энергиясын электр көзінен
нәтижеге айтарлықтар ауытқулар енгізбейді, өйткені шығындар айтарлықтай үлкен емес. 5.11-сурет. Электр машинасының энергетикалық диаграммасы
Реттелмейтін ЭЖ-нің энергетикалық тиімділігі жайлы жалпы түсінікті 5.12-суреттен көруге болады. Онда редукторы бар қозғалтқыш ПӘК-інің салыстырмалы жүктемеге тәуелділігі көрсетілген. Толық жүктемеленбеген ЭЖ-лардың ПӘК-і төмен болады, сондықтан өте үлкен қуат қажет болмаған жағдайда зиянды болып есептеледі. Реттелетін ЭЖ-ларда (жылдамдық бойынша) энергетикалық тиімділік негізінен таңдалған реттеу тәсілімен анықталады. Осыған байланысты барлық тәсілдерді екі үлкен топқа бөлуге болады. Бірінші топқа —
Яғни ротор (якорь) тізбегіндегі шығындар кез-келген жүктеме кезінде жылдамдықтар айырмасына Реостаттық реттеу кезінде осы шығындардың
Энергетика жағынан алып қарағанда 2-ші топ тәсілдері тиімдірек, өйткені (5.15)-формулада жылдамдықтар айырмасы .12-сурет. ПӘК-тің үлкен болмағанда қондырғыларды тұқият салыстыру қажет. жүктемеге тәуелділігі
ЭЖ құралдарымен энергияны сақтау. Энергияны сақтау проблемасын шешу үшін дүние жүзілік практикада бірнеше негізгі бағыттар анықталған. Олар мыналар: 1. ҚТР АҚ негізінде жасалған реттелмейтін ЭЖ-ларда басты назар энерготиімді қозғалтқыштарға аударылған. Бұл қозғалтқыштарда актив материалдардың массасын, олардың сапасын көбейту арқылы және арнаулы жобалау әдістерін қолданып номинал ПӘК-ті 1-2 %-ға (қуатты қозғалтқыштар) немесе 4-5 %-ға (кішігірім қозғалтқыштар) көтеруге қол жеткізілді. Бірақ бұл кезде қозғалтқыш құны аздап қымбаттады. Энергияны сақтаудың бұл бағыты жылдамдықты реттеу талап етілмегенде, жүктеме аз өткергенде және қозғалтқыш дұрыс таңдалғанда ғана тиімді. 2. Энергияны сақтаудың маңызды жолдарының бірі-нақты технологиялық процесс үшін қозғалтқышты дұрыс таңдау. Европа елдерінде қозғалтқыштар (орта есеппен) жүктемесі 0,6-ны құрайды деп қабылданған. Үнемдеуде тек соңғы жылдары ғана қарастырып жатқан біздің елімізде бұл көрсеткіш 0,3-0,4-ті құрайды. Яғни қажет емес жерге қуаты үлкен қозғалтқыш қойылып, ПӘК-і төмендетілген. |



 -М бетініңтөрт квадрантында орналасуы мүмкін. 5.4 суретте асинхронды қозғалтқыштың (М) және ортадан тепкіш машинаның
-М бетініңтөрт квадрантында орналасуы мүмкін. 5.4 суретте асинхронды қозғалтқыштың (М) және ортадан тепкіш машинаның  сипаттамалары көрсетілген. Шамалардың таңбалары қозғалыстың бір бағытын оң деп қабылдағаннан кейін анықталады: мәселен сағат тілінің бағыты бойынша оң + немесе жоғары қарай қозғалыс оң+ және т.б. Қозғалыс бойынша бағытталған моменттер (қозғағыш моменттер) таңбасы жылдамдық таңбасына сәйкес болады. (Қозғалтқыш сипаттамасының
сипаттамалары көрсетілген. Шамалардың таңбалары қозғалыстың бір бағытын оң деп қабылдағаннан кейін анықталады: мәселен сағат тілінің бағыты бойынша оң + немесе жоғары қарай қозғалыс оң+ және т.б. Қозғалыс бойынша бағытталған моменттер (қозғағыш моменттер) таңбасы жылдамдық таңбасына сәйкес болады. (Қозғалтқыш сипаттамасының  бөлігі); қозғалысқа қарсы бағытталған моменттер (тежегіш моменттер) таңбасы жылдамдық таңбасына қарама-қарсы болады. (сипаттамалардың қалған бөліктері).
бөлігі); қозғалысқа қарсы бағытталған моменттер (тежегіш моменттер) таңбасы жылдамдық таңбасына қарама-қарсы болады. (сипаттамалардың қалған бөліктері). Реактив моменттер –қозғалысқа барлық уақытта қарсы бағытталатын яғни барлық уақытта тежегіш моменттер. Мысалы: Үйкеліс күшінің әсерінен болатын моменттер. Мысалы 5.4 суретте ортадан тепкіш машинаның Мс-моменті. Механикалық сипаттамалар екінші-және өртінші квадрантара орналасады.
Реактив моменттер –қозғалысқа барлық уақытта қарсы бағытталатын яғни барлық уақытта тежегіш моменттер. Мысалы: Үйкеліс күшінің әсерінен болатын моменттер. Мысалы 5.4 суретте ортадан тепкіш машинаның Мс-моменті. Механикалық сипаттамалар екінші-және өртінші квадрантара орналасады. . Олардың түрлері: (5.5 сурет)
. Олардың түрлері: (5.5 сурет) (1) абсолют қатаң
(1) абсолют қатаң (2) .
(2) . >0(3) –теріс қатаңдық;
>0(3) –теріс қатаңдық; , АВ және ВС кесінділері тең.
, АВ және ВС кесінділері тең.
 , (5.2)
, (5.2)
 және беріліс ПӘК-і
және беріліс ПӘК-і  арасындағы қатынас-тұрақты.
арасындағы қатынас-тұрақты. өзгеріссіз қалуы керек.Яғни біздің жағдайда шығындар қозғалтқыш әсерінен жабылады. (М мен
өзгеріссіз қалуы керек.Яғни біздің жағдайда шығындар қозғалтқыш әсерінен жабылады. (М мен  яғни
яғни 
 (5.3)
(5.3) (5.4)
(5.4)
 (5.5)
(5.5)

 моменті өзгерістері бірдей болғанмен реттеу диапазоны әртүрлі болуы мүмкін. Ол жасанды сипаттамалардың қатаңдығына байланысты.
моменті өзгерістері бірдей болғанмен реттеу диапазоны әртүрлі болуы мүмкін. Ол жасанды сипаттамалардың қатаңдығына байланысты.
 ) ал кейде өте жұмсақ жасанды сипаттамалар қажет болады.
) ал кейде өте жұмсақ жасанды сипаттамалар қажет болады. (5.6)
(5.6) тораптан алынатын қуатпен Р1 салыстырады, яғни қандай да бір нүктедегі ∆Р шығыны анықталады немесе ПӘК
тораптан алынатын қуатпен Р1 салыстырады, яғни қандай да бір нүктедегі ∆Р шығыны анықталады немесе ПӘК  есептеледі::
есептеледі:: . (5.7)
. (5.7) анықталады:
анықталады: , (5.8)
, (5.8) (5.9)
(5.9) (5.10)
(5.10) , (5.11)
, (5.11) ; реттелетін ЭЖ үшін берілген момент кезіндегі
; реттелетін ЭЖ үшін берілген момент кезіндегі  тәуелділігін пайдаланған ыңғайлы.
тәуелділігін пайдаланған ыңғайлы. (5.12)
(5.12) — ауытқулар коэффициенті;
— ауытқулар коэффициенті;  — фазалық кернеу, ток және токтың бірінші гармоникасының нақты мәндері;
— фазалық кернеу, ток және токтың бірінші гармоникасының нақты мәндері;  — кернеу мен токтың бірінші гармоникалары арасындағы ығысу бұрышы.
— кернеу мен токтың бірінші гармоникалары арасындағы ығысу бұрышы. , яғни
, яғни (5.13)
(5.13) -қа пропорционал болатын бірінші құрамдаманы айнымалы шығындар деп есептейді, өйткені I~М. Ал қалған екі шығын тұрақты болып есптеледі, өйткені магнит өткізгіштегі шығындар магнит индукциясының тұрақты амплитудасы мен жиілігі бойынша анықталса, механикалық шығындар – тұрақты жылдамдықпен анықталады.
-қа пропорционал болатын бірінші құрамдаманы айнымалы шығындар деп есептейді, өйткені I~М. Ал қалған екі шығын тұрақты болып есптеледі, өйткені магнит өткізгіштегі шығындар магнит индукциясының тұрақты амплитудасы мен жиілігі бойынша анықталса, механикалық шығындар – тұрақты жылдамдықпен анықталады. , (5.14)
, (5.14) — тұрақты шығындар; I және R— күштік тізбектің фазалық тогы мен эквиваленттік кедергісі; т — фазалар саны.
— тұрақты шығындар; I және R— күштік тізбектің фазалық тогы мен эквиваленттік кедергісі; т — фазалар саны. (немесе тұрақты ток ЭЖ-лары үшін
(немесе тұрақты ток ЭЖ-лары үшін  ) айнымалы жүктемеге
) айнымалы жүктемеге  беру кезіндегі шығындар диаграммасы көрсетілген.. Сонымен бірге суретте электромагниттік қуат
беру кезіндегі шығындар диаграммасы көрсетілген.. Сонымен бірге суретте электромагниттік қуат  — машинаның ауалық қуысындағы қуат та көрсетілген.
— машинаның ауалық қуысындағы қуат та көрсетілген. ЭЖ-ның біз қабылдаған модельдерінде ыңғайлылық үшін біліктегі момент электромагниттік моментке, ал ΔМ, шығындарымен байланысты момент кедергі моментіне Мс келтірілгендеп қабылдағанбыз. Осы тұжырым ЭЖ-ның анализі мен синтезінің барлық кезеңдерін жеңілдетеді, көпшілік жағдайларда
ЭЖ-ның біз қабылдаған модельдерінде ыңғайлылық үшін біліктегі момент электромагниттік моментке, ал ΔМ, шығындарымен байланысты момент кедергі моментіне Мс келтірілгендеп қабылдағанбыз. Осы тұжырым ЭЖ-ның анализі мен синтезінің барлық кезеңдерін жеңілдетеді, көпшілік жағдайларда — болатын реостаттық реттеудің барлық түрлері, қысқа тұйықталған роторлы асинхронды қозғалтқышты (ҚТР АҚ) тұрақты жиілік кезінде кернеуді өзгерту арқылы реттеу түрі кіреді. Егер Рэм ≈ΔР және ΔР2 ≈ΔР2м, деп қабылдасақ, бұл топ үшін:
— болатын реостаттық реттеудің барлық түрлері, қысқа тұйықталған роторлы асинхронды қозғалтқышты (ҚТР АҚ) тұрақты жиілік кезінде кернеуді өзгерту арқылы реттеу түрі кіреді. Егер Рэм ≈ΔР және ΔР2 ≈ΔР2м, деп қабылдасақ, бұл топ үшін: , (5.15)
, (5.15) немес сырғанауға
немес сырғанауға  пропорционал болады.
пропорционал болады. -қа пропорционал болатын бір бөлігі ғана машина ішіне таралып, оны қыздырады. Ал
-қа пропорционал болатын бір бөлігі ғана машина ішіне таралып, оны қыздырады. Ал  -қа пропорционал болатын екінші бөлігі машина сыртына таралады, яғни ЭЖ-ның энергетикалық көрсеткіштері нашарлайды. Яғни осы бөлік каскадты схемаларда пайдалы қызмет атқарады.
-қа пропорционал болатын екінші бөлігі машина сыртына таралады, яғни ЭЖ-ның энергетикалық көрсеткіштері нашарлайды. Яғни осы бөлік каскадты схемаларда пайдалы қызмет атқарады. Екінші топқа —
Екінші топқа —  — тұрақты ток ЭЖ-ларындағы реостатсыз реттеудің барлық тәсілдері, яғни кернеу мен магнит ағынын өзгерту арқылы реттеу тәсілдері және айнымалы ток ЭЖ-ларындағы жиілікті реттеу тәсілі кіреді.
— тұрақты ток ЭЖ-ларындағы реостатсыз реттеудің барлық тәсілдері, яғни кернеу мен магнит ағынын өзгерту арқылы реттеу тәсілдері және айнымалы ток ЭЖ-ларындағы жиілікті реттеу тәсілі кіреді. , бірақ
, бірақ