| ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса - ваш вокал Игровые автоматы с быстрым выводом Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Вкуснейший "Салат из свеклы с чесноком" Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека - Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
| Есептеу нагрузок на оси автомашины передвижных установок
Мынаны қарастырайық, мысал ретінде ППУА-1600/100 ұңғыманы жылулық өңдеуге арналған қондырғыны есепетейсіз. ППУА-1600/100 қондырғысы өзімен жабдықтар комплексін ұсынады, КрАЗ-255Б1А автокөлігінің шасиінде қондырылған (11.3, а суретте). Автокөлiктің осіне түсетiн салмақты анықтауда қабылдайды: автокөліктің алдыңғы осі, Х координатасын анықтағанда; топырақ беті, у координатасын анықтағанда. Барлық құрастырылымның координаттары минус белгісімен белгіленеді, автокөліктің алдыңғы осінің алдында орналасқан. Алынатын жабдықтар келесі мінездемелерге ие: жалпы масса Рci; координаттар хci, алдыңғы көпірге оның салмағы FсAi; арбаға түсетн салмақ Fcвi. Қайта орналастырылатын құрастыру есепке алынады, шешкенде - нұсқағыштың бағыты жоғары, құрастырылымды құрғанда - нұсқағыштың бағыты төмен болады. Жеке түйіндердің және автокөлік агрегаттарының массасы мен координаттары алынады автокөлік шассиінің массалы мінездемесінен алынады.
Автокөлік шассиінің мінездемесі
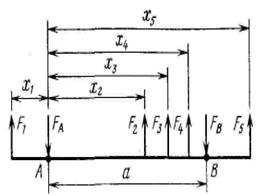
11.4.суретте автокөлік шассиінің осіне әсер ететін салмақтың бастапқы улестірілімі көрсетілген. Автокөлік жолына түсетін алдынғы көпір мен арба арқылы жеке құрастырылымды шешкенге дейнгі салмақты формуламен анықтайды
Есептік схемада (11.5 суретте) автокөлік құрастырылымын шешкендегі салмақ көрсетілген құрастырылымын шешкеннен кейінгі автокөліктің масса
жеке құрастыруларды алудан кейiн, автокөлiктен жолға салмақты үлестiрулер тең болады: алдынғы көпір арқылы
арба арқылы
Сурет 11.3. ППУА-1600/ 100 қондырғысы.
Алдынғы көпір арқылы және арба арқылы автокөліктен жолға түсетін салмақты анықтау жабдықтарды қондырғаннан кейін. Техникалық құжаттардан ППУ барлық жабдығының массалық мінездемені алады, автокөлік шассиіне қондырылатын. Салмақ үлестіру схемасына 1800 Н – ға тең екі адамдық экипаж салмағын қосады Алдынғы көпір арқылы және арба арқылы автокөліктен жолға түсетін салмақты, ППУ(Fy) қондырылған жабдықтарды ескере отырып және экипаж салмағын мына теңдіктен анықтайды:
Алдынғы көпір арқылы автокөліктен жолға түсетін салмақты, қондырылған жабдықтарды ескере отырып және экипаж салмағы Қондырғының толық массасы
Алдынғы көпірдің осіне қатысты ауырлық центрінің орналасуы мына формуламмен анықталады
Жабдықтың бүйірлік тұрақтылығының статикалық бұрышын анықтау. Бүйірлік тұрақтылығының шартты бұрышы
Мұндағы b — автокөлік дөңгелегінің қалыңдығы; уу — жабдықтың жерге қатысты ауырлық центрінің орналасуы. Жабдықтың жерге қатысты ауырлық центрінің орналасуы келесідей анықталады:
мұндағы yавт — автокөліктің жерге қатысты ауырлық центрінің координатасы. Барлық анықталған есептеулер нәтижелері автокөліктің техникалық мінездемелерінде қарастырылған рұқсат етілген ауытуладың шамасында ғана болулары тиіс. Негізгі әдебиет 1 [бөлім 12 1, 5 , 7] Қосымша әдебиет 2 [ бет 363-392] Бақылау сұрақтары 1. Ұңғыны қышқылдық өңдеу құрылғысы қандай сұйықтықпен жұмыс істейді? 2. Ұңғыны қышқылдық өңдеу құрылғысында қандай сораптың типтері қолданылуы тиіс? 3. Құм илегіш қондырғылардың жұмыс істеу шартын ата. 4. Құм илегіш қондырғылардың шнекті құрылғысының берілісін қалай есептейді және қажет қуатын қалай анықтайды? 5. Қалақшалы араластырғыш берілісіне қажетті қуатын қалай есептейді?
Лекция № 12. Мұнай жабдықтарының қызмет етуі және агрегатты монтаждау. Өнеркәсіпте арнайы агрегаттарды максималды механизациалау көп еңбекті жұмыста монтаждау және қызмет етуі мұнай өнер кәсібәнің қолданады, келесі шарттар орындалады: Ұзын жүктерді тасмалдау (штангілер, трубы, ұңғымалық сорап); Жабдықтарды тасмалдау (тербелмелі-станок, УЭЦН, фонтанды арматура, тб.); Ұңғымаларды жөндеу үшін дайындалған жұмыстар; мачталарды, вышкаларды топырақа бекіту үшін механизайиаланған қондырғыларды және анкерлерді шығарылады; тербелмелі-стонокты қызмет етуі және жөндеуі, ұңғыманы жөндеу үшін агрегаттар, өлшеммелі қондырғылар, электроқондырғылар және басқада жергілікті жабдықтар. Штангалы сораптарды тасмалдауға арналған агрегаттар. штангалы сораптарды тасмалдау үшін агрегат-штанговоздың конструкциясы сипаттамасы 12.1 суретте көрсетілген. Осы агрегатта сорапты компрессорлы құбырларды және сорапты штангалы ұңғымаларды тасмалдауға болады. АПШ штангавозы ЗИЛ-130-В1 жасалған тягачінен, гидравликалық кранынан және арнайы жартылай прицепінен тұрады. Арнайы жартылай прицеп — бортсыз, біросьті, тұрақты рамасынан, тұтас металды еденнен, шек қоятын тұрақтардан және алдыңғы сақтандыратын қалқаннан тұрады . Ось, дөңгелек, ілгіш, стояноколы тормозі, пневмо- және электрожабдықтарының біріңғайлы ОДАЗ-885 сериалы жартылай прицепі шығарылған .
сурет. 12.1. АПШ штангавозы: 1 - тягач; 2 — басқару пульті; 3 — салымбалы тұрақ; 4 -жартылайприцеп; 5 — гидравликалық кран; 6 — қолмен жұмыс істейтін лебедксы.
Штангавоз 4030П моделінде гидравликалық кран шығарылатын тұрақтардан тұрады. Транспорттау кезінде кранның жебесі бойлау осьсінің дөңгелекке еңкеліп бағытталады және арнайы жабдықпен бекітеді. Жүру кезінде жебенің бағыты оңға және солға 100 градусқа айналады. Мысалға қарастырылған АПШ агрегатының анықтау тәсілі кейбір жүріс сипаттамасы және мұнай өнеркәсібінің агрегаты тұрақтандырылған, автомашинаны монтаждауы. 1. Штанговозды тарту есебі . тарту есебінің мақсаты — максималды көтерілу бұрышының анықталуы, автопоезттің көтерілуінің әртүрлі қозғалыс жылдамдығы үшін. Есептеудің берілгендері (автомобильдің сипаттамасынан алынған): Үлестіретін қорап қолдан-колға берілетын сандары беріледі; негізгі қадамның толық қадамы; автопоезттың толық салмағы; жалпы трансмиссии ПӘК-і; дөңгелектің тербеліс радиусы. Айналу момент жетектің жылдамдығы бойынша алынады. Негізгі есептеу формуласы:
Рк да — жанама тарту күші; Рв — ауаның қарсыласу күші; G — толық автопоезд салмағы. Жанама күш жетекті айналу моменттіне тура прапорцианал автомобиль трансмисиасының беріліс қатынасы:
μк— жетектің айналу моменті; tтр — трансмисиянаың беріліс қатынасы ; ηтр — трансмиссияның ПІК-і; rк — дөңгелектің тербелу радиусы (статикалық радиусы). Ауаның қарсыласуы мына формуламен анықталады:
Кв — ауаның қарсыласуы коэффицентті; υ — қозғалыс жылдамдыңы ; F —автомобильдің жоғарғы маңдай ауданы ;
В — ені; Н — автомобиль биіктігі. автомабиль жетектерінің жылдамдығының арасында және жетектің валының айналуына тәуелді, жылдамдықтар теңдеуімен көрсетілген;
nд— жетектің аййналу саны. :
α — жолдың қисаю бүрышы; f — тербелісті қарсыласу коэффиценті.
Асфальтті жиекті жолдар үшін ψ= f и ψ≤D. 2. еңкею бұрышының анықталуы, штанговоз пайдалы қуаты (групповая дорога). Динамический фактор по сцепному весу на горизонтальном участке дороги жолдың горизонталды бөлігінде динамикалық фактор шынжырлы салмағына байланысты
G1— тартылмалы автомабильдің салмағы және жүгі; φ — дөңгелектің жолмен қабысу коэффиценті ; G2 — штангавоздың салмағы жүкпен динамикалық фактордың иілу бұрышының төмендеуі берілген еңкею салмағының қабысуы.
f — жолдағы қозғалыстың қарсыласу коэффиценті. Еңкею салмағының қабысуының динамикалық факторы.
Жолдағы өтілген еңістің бұрышы (сур. 12.2)
Дөңгелектің жолмен қабысу коэффицентті φ и қозғалыстың қарсыласуы f жолдың жағдайына байланысты .
Берілген есептердің қортындысы бойынша, штангавоздың берілген игеруін анықтаймыз: агрегаттың қозғалуының жету жылдамдығыны және ең үлке еңісі, оның өтілетін жолдың немесе әртүрлі қапталған немесе ол сыз. 3.1 штангавоздың беріктігін есептеу. Есептің есептелуі — еңістің анықталуы, толтырылған автомабильдің тұрақтылығының бұзылуы көлденең және тігінен бағытталады,сонымен қатар гидрокран анықталады. 3.2. толтырылған автомабильдің көлденең тұрақтылығын анықтау (сур. 12.2). Шекті еңіс, қатты бетпен автомабильдің көлденең түрақтылығының бұзылады.
сур. 12.4. гидрокран тұрақтылығының анықталу схемасы: Gкр— кранның салмағы; G — жүктің салмағы; с — осьтің айналуынан ауырлық күшіне дейінгі арқашықтық; h — жебеден жазықтыққа бекітілген контурға дейінгі арақашықтық; h1 —осьтің ауырлық күшінен жазықтыққа дейінгі арақашықтық; а —кранның ауырлық күшінен жүктің ауырлық күшіне дейінгі арақашықтық ; в — кранның ауырлықкүшінен бекітілген плитаның соңына дейінгі арақашықтық; Н жебеден жүктің ауырлық күшіне дейінгі арақашықтық.
хт, y — артқы ілгішті автомабильдің ауырлық күшінің координатасы . Қозғалыстың қауіпзідігін қамтамасыз ету үшін келесі шарттар орындалады, дөігелектің тығылуының болмауы кездеінде:
где φ — дөңгелектің жолмен қабысуы.
Шекті еңіс, қатты жазықтықпен қозғалу кезінде тұрақтылық бұзылуы мүмкін.
В — автомабиль дөңгелегінің ені; yт — автомабиль ауырлық күшінің ұзындығы. Қозғалыс қауіпсіздігі үшін көлденең тұрақтылығы орындалуы келесі шарттармен орындалады:
Бекітілген құрғақ жазықтық коэффиценті φ = 0,7—0,зоностің алдын алады.
3.3 Гидрокаранның жүктік тұрақтылығын анықтау. Сонымен қатар кранның жүкпен және максималды шығу нүктесінде тұрған кезі қарастырылады (12.4-сурет). Аймақтың еңістігі мен желдің күшін кранды құлатуға жағдай жасайтындай етіп қабылдайды. Тұрақтылықты анықтау үшін еңсіздікті шешу керек
Мұнда: K1 — жүк тұрақтылығының коэффициенті, 1,4-ке тең; Мг — құлау қабырғасымен салыстырғандағы жұмыс жүгімен жасалатын момент; Мu — басқа да жүктемелердің моменті (негізгі және қосымша);
Мұнда: а — кранның жүк ауырлық центрі мен жүкітің ауырлық центрінің ара қашықтығы; b — кранның ауырлық центрінің тіреу плитасының аяғына дейінгі ара қашықтық;
(12.14)
Мв'— кранның өз салмағының әсерінен болатын қалпына келтіру моменті;
Мұнда Gкр — кран салмағы; с — айналу осі мен оның ауырлық центріне дейінгі ара қашықтық; α — шығару тіреулерімен жұмыс істегендегі бұрыш; Му — кранның еңкею кезінде өз салмағының әсерінен пайда болатын момент;
h1 — кранның ауырлық центрінің осінен тіреу контурының нүктелерінен өтетін жазықтыққа дейінгі ара қашықтық; Мцс — ортадан тепкіш күштердің әсерінен болатын момент:
Q—жұмыс жүгінің массасы; n— кранның айналу осі бойымен айналым саны; h — жебе мен тіреу контурының жазықтығы арасындағы ара қашықтық; H — жебеден жүктің ауырлық центріне дейінгі ара қашықтық; Ми — түсіріліп жатқан жүкті тежеген кездегі инерциялы момент;
υ – жүкті көтеру жылдамдығы; g— еркін түсу үдеуі; t — орнатылмаған жұмыс режимінің уақыты; Мв — жел жүктемесінің моменті:
Мұнда Мвк — желдің кранға әсер етуінің моменті; Мвг — желдің аспалы жүкке әсерінен болатын момент; Рв — кран орнатылған жазықтыққа парраллель соғатын желдің күші; PB1 — аспалы жүкке әсер ететін желдің күші; h1 — жүкті көтеру биіктігі; h — кран биіктігі. Тербелмелі-станокты жөндеуге және қызмет көрсетуге арналған агрегат
Агрегат мұнай-газ кәсіпшілігіндегі тербелмелі станоктарға жөндеу және қызмет көрсету үшін арналған. Сонымен қатар келесі жұмыстар іске асырылады: тербелмелі станок (ТС) түйіндері мен бөлшектерін тасымалдау, ТС майын ауыстыру және редукторларын жуу, 7 м-ге дейінгі биіктікте орналасқан ТС жоғарғы жақтарын қарау және қызмет көрсету. 4030П гидравликалық краны жүкті көтеріп-түсіру жұмыстарына, жөндеудегі ТС монтаждауға және демонтаждауға арналған. Транспортты жағдайда гидрокран жебесі тіреу бағанасына бекітіледі.
Аспалы-бесікті көтергіш 7 м-ге дейінгі биіктікте монтаждау және демонтаждау жұмыстарын және майлау операцияларын жүргізгенде темірші-жұмыскерлерді көтеруді қамтамасыз етеді. Ол жебесінің соңына кронштейн орнатылған, тұмсығы жоқ 4030П гидравликалық кранын білдіреді. Кронштейнге жиналмалы аспалы бесік шарнирлі бекітілген. Кабинаның алдыңғы панелінің бойымен арнайы рамада үш бак орналасқан: екі май (бірі – жаңа май үшін, екіншісі – қайта өңделгенге) және жуу сұйықтығына бір бак (дизель отыны және керосин). Бұл агрегатта аспалы бесікті көтергіштің конструкциясы ерекше. Гилроцилиндр штогындағы күшке және екі жағдай үшін аспалы бесікті көтеретін цилиндрдегі жұмысшы қысымды есептеу жүргізіледі (12.6-сурет): сап горизонталь орналасқан, цилиндр штогі толығымен шығып тұр (І жағдай); жебе сапты жерге тигізбей бұрауға болатындай, шеткі төменгі жағдайда орналасқан; шток толығымен алынған (ІІ жағдай). Гидроцилиндр штогындағы күшті І жағдайда мына формуламен анықталады
Ал ІІ жағдайда мына өрнектен аламыз
Мұнда rч, rл, rр, rв, rц — геометриялық параметрлер (12.6-суретті қара);ауырлық күштері: Gл — аспалы бесіктің; Gч — жүгі бар адамның; GP — саптың; Рв— аспалы бесікке әсер ететін желдің толық жүктемесі, (12.40) формуласымен анықталады. Гидроцилиндрдегі жұмыс қысымы І жағдайда мына формуламен анықталады
ал ІІ жағдайда мына өрнектен аламыз
мұнда, Fц— гидроцлиндр қимасының ауданы; Fшт— шток аумағының көлденең қимасы; nц — шынжырлы берілістің ПӘК-і (0,95 деп алуға болады).
Рис. 12.6. Схема для расчета механизма подъема люльки: I — III — саптың орналасу жағдайлары; Рь — аспалы бесікке әсер ететін желдің толық жүктемесі; ауырлық күштері: Gл —аспалы бесіктің; Gp —саптың; Gч —адамның; rч, rл, rр, rв, rц — геометриялық параметрлер
Саптың денесінің кедергі моменті оның көлденең қимасының формасына байланысты анықталады. Бұл есептеулер кезінде сап көтергіш тұтқасы мен аспасының осінде берік бекітілген деп алынады. (12.6-сурет ІІІ жағдай)
Негізгі әдебиет 1 [13тар. 113-171бет.]
Бақылау сұрақтары 1. Агрегаттардың мұнай кәсіпшілігі жабдықтарын монтаждау және қызмет көрсетудегі функциясы туралы айтыңыз. 2. Автомашинада агрегаттың жүріс сипаттамасы қалай анықталады? 3. Агрегатқа рұқсат етілген еңкею бұрышын қалай есептейді? 4. Агрегаттың тұрақтылық көрсеткіштері қалай анықталады? 5. Гидроцилиндр штогіндегі жүктеме мен аспалы бесікті көтеру цилиндріндегі жұмыс қысымын есептеудің әдісін сипаттаңыз. Дәріс №13. Гидроберілісті штангілі ұңғымалы сорғылы қондырғыларды құрастыру және есептеу Қондырғылардың қалыпты сұлбалары Штангілі ұңғымалы сорғылы қондырғылардың механикалық берілісін гидроберіліспен аусытыру штангілі сорғының жүрісінің бірден ұзаруын, штангі аспаларының блогінің қозғалыс заңдылығының сипаттамасын жақсартуға және металл көлемі мен ШҰСҚ-ң жетекші бөлігінің массасын азайтуға мүмкіндік береді. Сондықтан ШҰСҚ-ны гидрофикациялауда бірқатар әрекеттер жасалды, бірақ олардың көбісі сәтсіз аяқталды. Гидрожетекті ШҰСҚ –ң көптеген сұлбалары белгілі, бірақ олардың кейбіреулері ғана реализацияланған және қолданыс тапқан қондырғыларда орнын тапты [12]. Гидрожетекті ШҰСҚ-ң конструкцияларын жетілдірген сайын, олардың саны кәсіпшілікте артып келеді. Гидрожетекті ШҰСҚ-ң артықшылықтары олардың шығару саны жақынарада күрт өседі деуге мүмкіндік береді, ал ол ұңғымаларды штангілі сорғылармен пайдаланудың эффетивтілігін айтарлықтай арттырады.
Штангінің жоғары қарай қозғалысы кезінде сұйықтық бағаны мен штангілері колоннасын көтеру үшін энергия электрқозғалтқыштан және маховиктен келеді. Штангінің төмен қарай жүрісі кезінде штангілердің потенциалдық энергиясы гидрожетек арқылы маховикке беріліп, оны қорландырады. Бұдан басқа, штангінің төмен қарай жүрісі кезінде электрқозғалтқыш та өз энергиясын маховикке береді. Осылай, штангінің жоғары қарай жүрісі кезінде маховиктің кинетикалық энергиясы штангілер колоннасы мен сұйықтықты көтеруге кетсе, ал штангінің төмен жүрісі кезінде маховик штангілер мен жетекші қозғалтқыштың энергиясын жинайды. Штангінің оғары қарай жүрісі кезінде жұмыс сұйықтығы күштік сорғының әсерінен бактен 4 золотникті таратқыш арқылы цилиндрдің поршень асты аумағына беріледі, және оның поршені жоғары қарай жылжиды. Ең жоғарғы жағдайға жеткенде және реверстеу жүйесі іске қосылғанда золотникті бөлгіш күштің сорғының арындық келте құбыры мен цилиндрдің астыңғы аумағын бакпен жалғайды. Поршень штангілер колоннасының салмағы әсерінен төмен қарай жылжи бастайды, ал жұмыс сұйықтық арыны күштік сорғыдан бакке бағытталады. Күштік блок өзіне жұмыстық сұйықтықты бактен 10 бөлгіш 8 арқылы кезек кезек 1-4 цилиндрлердің жоғарғы аумағына беріп отыратын сорғыны 9 қосады. Сорғының шыға берісінде қайта құю қақпақшасы 16 орнатылған. Штангінің аспа нүктесінің қозғалысының кинематикасы мен динамикасы Ұңғымалы сорғының гидрожетегі кривошипті-шатунды механизмі бар механикалық жетектен айырмашылығы онда жетекші звеноның штангінің аспа нүктесімен берік кинематикалық байланыстың болмауы, бұл жылдамдық пен үдеудің штангінің аспа нүктесінің орналасуынан бірдей тәуелді болуын тоқтатуына әкеледі. Аспа нүкесінің жылдамдығының өзгерісі 13.9-суретте жуықталып көрсетілген,қозғалыс фазасы үш топқа бөлінген: пауза (поршеньнің қозғалысы болмағанда), орнатылмаған (жылдамдық алу немесе тежелу) және орнатылған қозғалыс. Келесі жорамалдар қабылданады: жүктеме; күштік сорғының жіберілімі бірқалыпты; гидроқұбырдағы сұйықтық сығылмайды. Орнатылған қозғалыстағы кинематика. Штангілі және құбырлы цилиндрдің қозғалысының басы паузамен (фаза 1) жалғасады, ол бөлгіш золотниктің терезе ашылғанша дейін оңнан солға қарай (13.9-сурет) қозғалысымен шартталған, ал ашылған терезелермен сұйықтық сорғыдан келіп цилиндрлерге жіберіледі. Циклдің басында бөлгіштің золотнигі ортаңғы жағдайда болып, бірқалыпты қозғалады. Золотниктің нейтрал жағдайынан өткеннен кейін – жұмыс сұйықтығы күштік сорғыдан құбыр бойымен құбырлы цилиндрдің жоғарғы аумағына қозғалады (фаза 2), ал оның төменгі аумағынан құбырлы цилиндрдің төменгі аумағына жылжып, поршеньді жоғары қарай қозғалтады. Штангілі цилиндрдің жоғарғы аумағындағы жұмыс сұйықтығы золотник арқылы бакке барады. Осылайша, құбырлы цилиндрдің поршені және сәйкесінше құбырлар колоннасының аспа нүктесі төмен қарай жылжып, ал штангілі цилиндрдің поршені мен штангілер аспа нүктесі төмен қарай орын ауыстырады. Екінші фазада поршеньдер үдеумен қозғалады. Фазаның жалғасуы уақытқа байланысты, сол уақыт ішінде құбырлы цилиндрдің поршені жылдамдық жинап, ал поршеннің көлемдік жылдамдығы сорғының берілісіне тең болады. Осы уақыт аралығында жұмысшы сұйықтың бір бөлігі қайта құб қақпақшасы арқылы бакке барады. 13.9-суретте жылдамдық алу уақыты (фаза 2) ab аралығымен белгіленген, ал үдеуді тұрақты деп алынған.
13.9-сурет. bc (фаза 3) орнатылған қозғалысты кривошипсіз тербелмелі станоктың штангілерді аспа нүктесінің жылдамдығының өзгеруінің жуықталған заңдылығы.
Цилиндрдің жоғарғы және төменгі аумағындағы поршеньдердің эффективті ауданының өзгерісін ескеретін осы периодтағы штангілер қозғалысының жылдамдығы:
Мұнда Fтц — құбырлы цилиндрдің эффективті көлденең қимасының ауданы; F – цилиндрдің көлденең қимасының ауданы; f — штангілі цилиндрдің көлденең қимасының ауданы; fшц — штангілі цилиндрінің поршенінің көлденең қимасының эффективті ауданы (13.9-сурет).
Поршеньдердің шеткі жағдайға жақындаған кезінде реверсирлеу жүйесі іске қосылып, бөлгіштің ауысыуы басталады. Сонымен қатар оның гидравликалық кедергісі өсіп, сорғының шыға берісінде қысым өсіп, қайта құю қақпақшасы ашылады. Ол арқылы жұмыс сұйықтығының бір бөлігі бакке қарай ағады. Тежелу периоды cd аралығына сәйкес келеді (фаза 4). Поршеньдер тоқтағаннан кейін пауза it (фаза 10) болады, бұл период кезінде золотник терезелері жабық болып, кейін цикл қайталанады. Абсолют және салыстырмалы жылдамдықтарды анықтау формулалары 13.1-кестеде келтірілген. Штангілер аспасының нүктелірнің және құбырлардың орын ауыстыруы, жылдамдықтары мен үдеулері өзара байланысты. Ол штангілі және құбырлы цилиндр поршеньдерінің астындағы сұйықтық көлемінің тұрақтылығына негізделген:
Құбырлар мен штангілердің салыстырмалы орын ауыстыруы олардың абсолютті орын ауыстыруына тең екенін ескерсек, L = /In + /T, онда мынаны аламыз:
Уақыт бойынша дифференциалдап, мынаны аламыз υi = (Fтц/fшц) υт. Осындай өрнекті үдеулер үшін де аламыз:
Осылайша, құбырлардың аспасының орын ауыстырудының, жылдамдығының және үдеудінің өзгерісін штангілердің аспа нүктесіне арналған сәйкес формуласының мына қатынасқа Fтц/fшц = lш/lт көбейтіндісінен алуға болады, мұнда kф– тепе-теңдік параметрі. Штангінің екі жүрісінің уақытын жуықтап, былай анықтаға болады:
lш-ны L арқылы өрнектеп, мынаны аламыз
Штангі аспасының нүктесінің 1 мин-ғы қос жүріс саны мына өрнекпен сипатталады:
Орнатылмаған қозғалыстағы кинематика. Штангі аспа нүктесінің жылдамдық алу фазасын екі периодқа бөлген дұрыс: 1) ұңғыма сорғысының плунжерінің үстінде сұйықтық бағанының салмағы әсерінен штангілердің серпімді деформациясы кезіндегі жылдамдық алу; 2) бұл процесс аяқталғаннан кейінгі жылдамдық алу; Штангінің серпімді деформация периодында х орын ауыстырған кезінде жоғары қарай жүрісі (13.8-сурет) басталған кезде штангілі және құбырлы цилиндрдің поршеньдеріне келесі күштер әсер етеді. 1. бөлгіштегі қысым айырмашылығының Δрр әсерінен штангілі цилиндрдің порненіне жоғарыдан күш әсер етеді. 2. поршеньге астынан поршень астындағы аумақтағы сұйықтық қысымынан р' пайда болатын күш әсер етеді. Шток арқылы поршеньге штангілер салмағының күші Рш әсер етеді, сұйықтық бағанасының салмағының бір бөлігі ұңғымалы сорғының Ржх/х’плунжерінің үстінде, мұнда х’ — штангі аспа нүктесінің орын ауыстыруы, сұйықтық бағанасының салмағының құбардан штангіге ауысу моментіне сәйкес. 3. штангілер колоннасының және онымен байланысқан қондырғы бөлшектерінің үйкеліс күші Тв. 4. штангілердің жоғары қарай қозғалғандағы жылдамдық алу кезіндегі инерция күші.
мұнда, kwд — колоннаның ұзындығы бойынша үдеудің өзгерісін ескеретін коэффициент kwд =0,5.
Шланг цилиндрі поршенінің тепе-теңдігінің дифференциалды теңдігі мынаған ие болады:
Сонымен қатар құбырлы цилиндрдің поршеніне әсер етеді: жоғарыдан – сорғының айдайтын сұйығының қысымы рв—Δрдин — Δртр — Δрр, астынан – р' қысымы, СҚК колоннасының салмағы Рт, сақиналы сұйықтық бағанының салмағы Рк, ұңғымалы сорғының плунжерінің үстіндегі сұйықтық бағанының бір бөлігінің салмағы Рж [1 — (х/х’)], СКҚ колоннасының және құбырлардың аспа нүктесіне келтірілген қондырғы бөлшектерінің үйкелісі, құбырлар колоннасының олардың жылдамдық алған кездегі инерция күші Рн:
Бөлгішті ауыстыру процесінде оның гидравликалық кедергісі шексіздіктен аз өлшемге дейін азаяды, ол толық ашық кездегі ішкі каналдардың кедергісіне шартталған. Сонымен қатар золотниктегі оның гидравликалық кедергісінің өзгеруі кезіндегі қысым өзгерісі
мұнда, р – сұйықтық тығыздығы; Q – бөлгіш арқылы жұмысшы сұйықтың шығыны; с – көлемдік жылдамдықты сипаттайтын тұрақты шама; μ – динамикалық тұтқырлық; t – ауысу басталудан кейінгі уақыт. Гидрожүйе құбырларындағы сұйықтың жылдамдық алуы қосымша қысымды талап етеді Δрдин = lпрρ(d υш/dt), мұнда lпр– диаметрлер өзгерісі ескерілген құбырлардың келтірілген ұзындығы. Құбырлардағы сұйықтың қозғалысы гидродинамикалық үйкеліске кететін қысымның жоғалуымен жүреді.
мұнда, d – құбыр диаметрі. Барлық күш факторларын ескергендегі құбырлы цилиндр поршенінің тепе-теңдігінің дифференциалды теңдігі мынандай болады:
(13.3), (13.6) және (13.8) алынған мәндер бірінші ретті дифференциалды теңдеулер жүйесін білдіреді, (13.6) және (13.8) р' болуы, оларды екінші ретті бір теңдеуге келтіруге мүмкіндік береді:
Келтірілген жеңлдетулерден кейін, теңдеуді мына түрге келтіруге болады:
мұнда G — штангінің аспа нүктесіне келтірілген қозғалмалы бөлшектердің (штангілер, құбырлар, сұйықтықтар) массасын сипаттайды; D — гидравликалық кедергіге негізделген және осылайша, жылдамдық квадратына тәуелді шығындар; В — штангілер аспасының орын ауыстыруымен байланысты жүктемелер; А —Ескерту: qш, qт — 1м штангілер колоннасы мен сорапты-компрессорлы құбырлардың массасы: qж, qк — ұңғымалы сорғының плундер үстіндегі сұйық бағанының және СКҚ және ұңғымалы сорғының цилиндріндегі ішкі диаметрлердің айырмашылығына негізделген сақиналы сұйықтық бағанының 1м-ң массасы; τ и r — штангілер колоннасына және СКҚ-ға қатысты үйкеліс күштің орта интенсивтілігі; m — динамикалық фактор, m= w/g формуласымен анықталады; w — штангілер колоннасының аспа нүктесі қозғалысының үдеуі; L — сорғы аспасының тереңдігі; в, н —штангі аспасының жоғары және төмен жүріс нүктелеріне сәйкес индекстер. (13.10) теңдеуі сызықты емес және элементарлы функцияларда шешімін таппайды. Оның шешімін сандық әдістермен табуға болады. Негізінде, жуық есептеулерді алу үшін Эйлер әдісін пайдалануға болады. Бұл жағдайдада (13.10) теңдеуі x'=z көмегімен бірінші реттік екі теңдеу жүйесі болып келеді:
Алынған теңдеулер жүйесін теңдеуді табу үшін итерациалық процесті қолдану керек:
мұнда, h — t ауысу уақыты. Бұдан да дәлірек сандық шешімді Рунге-Куттың әдісін қолдану кезінде алуға болады. Бұл жағдайда есептеулерді ЭЕМ-де жасау тиімді. Бұл есептердің шешімін табу үшін функциялардың Тейлор кезегіне орналастыруды қолданамыз:
х'(0), х"(0) және т.б. туындылар бастапқы жағдайларды ескере анықталады, мысалы, деформациялану периоды кезіндегі штангінің жоғары қарай жүрісі кезіндегі жылдамдықты алу кезінде х'(0)=0, х"(0) өз кезегінде (13.10) теңдеуінен табылады:
Штангі аспасының нүктесінің уақыт бойынша орын ауыстыруын жоғары ретті туындыларды таба отырып анықтаймыз, (13.13) теңдеуін дифференциалдау арқылы:
Уақыт бойынша дифференциалдап, штангілердің орын ауыстыру жылдамдығын табамыз:
Тағы бір рет дифференциалдап, оның үдеуін анықтаймыз:
Штангі аспасының нүктесінің келесі фазаларындағы орын ауыстыруды, жылдамдықты, үдеуді сипаттайтын теңдеулерді де осынадай әдіспен алуға болады, алайда олардың бастапқы жағдайы ретінде алдыңғы фазаның тоқтау моментіне сәйкес орын ауыстыру мен жылдамдықтың мәндерін алу керек. Штангі колоннасының аспа нүктесінің жоғары немесе төмен жүрісі кезіндегі тежеуі өзгеше болып келеді. Бұл теңдеудің шешімін сандық әдіспен анықтауға немесе оларды Тейлор ретіне орналастыруға болады. Эйлер әдісін қолданып, штангілер аспасының тежелу процесін сипаттайтын дифференциалды теңдеуінің шешімі
(13.11) жүйесінің шешіміндей болады, және келесі итерационды процесстің көмегімен алуға болады:
мұнда, h — t ауысу уақыты. Сонда штангілер аспасының нүктесіндегі және құбырлардағы жүктеме келесі анықтаулармен анықталады. Штангі аспасының нүктесіндегі қозғалыс кезіндегі жүктеме: жоғары
төмен
Құбырлардың аспасының нүктесіндегі қозғалыс кезіндегі жүктеме: жоғары
төмен
Ең негізгісі максималды вибрационды құраушыны Pi анықтау болып табылады. Призматикалық өзекке соққы жасағаннан пайда болатын кернеудің шешемін қолдана отырып, мынаны аламыз:
мұнда, fш – штангінің көлденең қимасының ауданы; Е – штангі материалының серпеімділік модулі; υ – штангі аспасының нүктесінің жсұйықтық бағанасының жүктемесін алған кездегі орын ауыстыруының жылдамдығы; а – металлдағы дыбыстың таралу жылдамдығы; m – штангі массасының сұйық бағанасының массасына қатынасы. Штангі немесе құбырдың орнатылған жылдамдығының алынған мәнін (13.2-кесте) қойсақ, онда штангі және құбыр үшін күшті Pi аламыз:
мұнда рж и рш — сұйықтық және штангінің сәйкесінше тығыздықтары. Өрнекті өзгерете отырып, штангінің жоғары жүріс кезіндегі максимал жүктемесін аламыз.
Осындай тәсілмен минимал жүктемені же табуға болады (13.11-сурет). Штангі және құбыр аспаларының нүктелерінің теориялық динамограммасын алынған тәуелділіктерді ескере салуға болады. Бұл штангі және құбыр колонналарындағы (13.11-сурет) тербелмелі процестерге шартталған статикалық күштер мен қосымша жүктемелердің диаграммаларының жиынтығын білдіреді. В және В1 D және D1 нүктелерінің ординатасының айырмашылықтары қосымша жүктеме Р сәйкес келеді, ал ол өз кезегінде қозғалыс бағытына байланысты статикалық күштермен қосылады немесе олардан алынады.
13.11-сурет. штангі (а) мен құбыр (б) аспасының нүктелеріндегі күш салудың диаграммасы
Гидрожетекті қондырғылардың динамограммасының ерекшелігі – онда балансирлі тербелмелі-станоктардағыдай сағат тілі бойынша айналудың болмауы, ол орнатылған және орнатылмаған қозғалыстардағы айқын аймақтардың болуымен шартталған. Поршеньнің бірқалыпты қозғалысының штангілі цилиндрдің төмен және жоғары үйкеліс және инерция күштерін ескермейтін жағдайын мына теңдеумен сипаттауға болады:
мұнда, (рш+pж)/fшц — штангінің жоғары жүрісі кезінде поршеньнің эффективті ауданы fшц бар штангілі цилиндрдің төменгі аумағындағы қысым; Рш/fшц — жаңағыдай, тек штангінің төмен қарай жүрісі кезінде; Δрв, Δрн— штангінің сәйкесінше жоғары және төмен жүрісі кезіндегі сорғыдағы қысымның ауысуы; рак — пневмоаккумлятордағы екі жүріс уақыты кезінде тұрақты деп алынатын газ қысымы. (13.25) оң және сол жақтарын қосып, өрнектеп, аккумуляторда тепе-теңдікті қамтамасыз ететін керекті қысымды аламыз:
Алынған өрнек структурасы бойынша балансирлі тербелмелі-станоктың жүгінің тепе-теңдік өрнегіне ұқсас. Біріккен сұлбасы және пневматикалық аккумуляторы бар қондырғыларды тепе-теңдікке келтіру. Жоғары және төмен қарай бірқалыпты қозғалыс кезінде қондырғы штогына (13.3-сурет) әсер ететін күштердің балансы мына түрге ие болады:
мұнда, fшц — штангілі цилиндр поршенінің эффективті ауданы; F — тепе-теңдік цилиндрі поршенінің эффективті ауданы; pв, рн — штангінің жоғары және төмен жүрісі кезіндегі сорғының алатын қысымы. (13.26) жасаған өрнектеу сияқты өрнектеуден кейін мынаны аламыз:
Инерционды жетекті қондырғыны тепе-теңдікке келтіру. Тепе-теңдікке келтіретін қондырғы маховик (13.6-сурет) болған жағдайда, оның анықаталатын негізгі параметрі оның инерция моменті J болып табылады. Штангінің жоғары жүрісі кезіндегі қозғалтқыштың жасайтын жұмысы:
штангінің төмен қарай жүрісі кезінде
мұнда, Uу — бір қос жүріс кезінде жинайтын және беретін кинетикалық энергияны қолдануға байланысты маховиктің жасайтын жұмысы. Цикл ассиметрисының коэффициентін a = tв/tн ескере штангінің жоғары және төмен қарай жүрісінің уақыты
мұнда Т — қосжүріс уақыты. Штангінің сәйкесінше жоғары және төмен жүрісі кезіндегі қозғалтқыштың орташа қуаты:
Nв = Nн тепе-теңдік жағдайынан қондырғыны тепе-теңдікке келтіретін тепе-теңдікке келтіретін құрылғының энергиясыйымдылығын анықтаймыз.
tв = tн, α=1 болғанда, қондырғының жұмыс циклі симметриялы болғанда, тік жақшаның ішіндегі рш+рш/2 өрнегі структурасы бойынша алдында алынған өрнекке ұқсас болады. Маховикпен жұтылатын немесе шығарылатын U энергиясы өзімен істелетін жұмыспен анықталады:
мұнда, wmax, wmin — маховиктің максимал және минимал айналу жиілігі. Алынған өрнектерді пайдалан отырып, қондырғының тепе-теңдікке келтіретін маховиктің инерция моментін табамыз:
Штангілі цилиндр поршеніне әсер ететін күштер балансы:
Құбырлы цилиндр поршенінің штангінің жоғары жүріс кезіндегі күштер балансы:
13.12-сурет. сорғымен берілетін сұйықтық қысымының тепе-теңдік параметріне тәуелділігі
Мәндерді теңдеуге қойып:
оны өрнектеп, штангілі және құбырлы цилиндрдің жоғарғы аумағына берілетін агенттің қысымын анықтайтын өрнек аламыз:
Штангілер мен құбырдың аспа нүктесіне әсер ететін күш салуларды ескерсек, өрнектегеннен кейін мынаны аламыз (13.12-сурет):
Қарастырып отырған қондырғылардағы тепе-теңдік сипаттамасы болып тепе-теңдік параметрі kф болып табылады. рв және рн қысымдырының kф байланысты өзгерісі 13.12-суретте көрсетілген. 1-3 сызығы штангінің жоғары қарай, 4-6 сызығы төмен қарай жүрісі, 2,5 сызықтармен поршеньдердің орнатылған қозғалысы, 1,4-үдемелі, 3,6- бәсеңдетілген қозғалысы көрсетілген. Орнатылмаған қозғалыс кезіндегі қысымдар теңдігін (13.38) және (13.39) теңдеулерінің оң жақтарын теңестіріп алға болады. Өрнектегеннен кейін кубтық теңдеудің келесі түрін аламыз:
мұнда
Алынған өрнекті анализдеуден шығатыны, штангі аспасы нүктесінің орнатылған қозғалысы кезінде, яғни m = 0 болғанда, (13.40) теңдеуі қарапайым квадраттық теңдеуге ауысады:
Олардың коэффициенттері |



 (11.11)
(11.11)
 :
:

 а — жалпы көрініс: 1 — кузов; 2 — бугенератор; 3 — берілістік топ; 4 — қоректенгіш сорап; 5 — суға арналған сыйымдылық; б — кинематикалық схема: 1 — автокөлік қозғалтышы ; 2 - қуат таңдау қорабы; 3 — тістегерішті сорап; 4 —қоректенгіш сорап; 5 - желдеткіш; 6 – автокөліктің таратушы қорабы; 7 — беріліс қорабы.
а — жалпы көрініс: 1 — кузов; 2 — бугенератор; 3 — берілістік топ; 4 — қоректенгіш сорап; 5 — суға арналған сыйымдылық; б — кинематикалық схема: 1 — автокөлік қозғалтышы ; 2 - қуат таңдау қорабы; 3 — тістегерішті сорап; 4 —қоректенгіш сорап; 5 - желдеткіш; 6 – автокөліктің таратушы қорабы; 7 — беріліс қорабы.
 (11.12)
(11.12)
 (11.13)
(11.13)
 (11.15)
(11.15) (11.16)
(11.16)
 (12.1)
(12.1) (12.2)
(12.2) (12.3)
(12.3) (12.4)
(12.4) (12.5)
(12.5) (12.6)
(12.6) (12.7)
(12.7) (12.8)
(12.8) (12.9)
(12.9) (12.10)
(12.10)
 (12.11)
(12.11)
 (12.12)
(12.12)

 (12.13)
(12.13)
 (12.15)
(12.15) (12.16)
(12.16) (12.17)
(12.17) (12.18)
(12.18) (12.19)
(12.19)
 (12.20)
(12.20) (12.21)
(12.21) (12.22)
(12.22) (12.23)
(12.23)



 (13.1)
(13.1) (13.2)
(13.2) (13.3)
(13.3)
 (13.4)
(13.4) (13.5)
(13.5)
 (13.6)
(13.6)
 (13.7)
(13.7)
 (13.8)
(13.8) (13.9)
(13.9) (13.10)
(13.10) (13.11)
(13.11)
 (13.12)
(13.12) (13.13)
(13.13) (13.14)
(13.14) (13.15)
(13.15) (13.16)
(13.16) (13.17)
(13.17)




 (13.23)
(13.23)
 (13.24)
(13.24)
 (13.25)
(13.25) (13.26)
(13.26) (13.27)
(13.27) (13.28)
(13.28) (13.29)
(13.29) (13.30)
(13.30)
 (13.31)
(13.31) (13.32)
(13.32)
 (13.33)
(13.33) (13.34)
(13.34) (13.35)
(13.35)
 (13.36)
(13.36) (13.37)
(13.37)
 (13.38)
(13.38)
 (13.39)
(13.39) (13.40)
(13.40)
 (13.41)
(13.41)