| ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса - ваш вокал Игровые автоматы с быстрым выводом Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Вкуснейший "Салат из свеклы с чесноком" Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека - Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
| а) положения звеньев, скорости и ускорения точек и звеньев
б) положение звеньев в) скорости и ускорения звеньев и точек г) ускорения точек и силы
4.9. Определение реакций в кинематических парах является задачей: а) кинематического анализа механизма б) силового анализа механизма в) структурного анализа механизма г) динамического анализа механизма
5.9.Конические зубчатые передачи передают вращательное движение при …… расположении осей: а) параллельном в) скрещивающимся б) пересекающимся
5.19. В формуле Герца величина qпр – это: А) распределенная нагрузка по длине контактной линии б) модуль продольной упругости материала колеса в) радиус кривизны
5.29. Диаметры участков валов под подшипники качения выбирают в соответствии … а) с внутренним диаметром подшипника. Б) с внешним диаметром подшипника в) со средним диаметром подшипника
5.35. Быстроходность шариковых подшипников качения по сравнению с роликоподшипниками: а) большая.в) одинаковые б) меньшая ТЕСТ-БИЛЕТ 10
1.2. Изделие, изготовленное из однородного по наименованию и марке материала, называют: а) деталью в) механизмом б) изделием г) машиной
1.10. К показателям надежности детали относят: а) жесткость; б) износостойкость; в) безотказность; г) теплостойкость; д) виброустойчивость.
1.20. Неточности расчетов на прочность компенсируются за счет: А) запасов прочности б) увеличения габаритов деталей в) проверочных расчетов г) уменьшения габаритов деталей
2.10. Степень подвижности структурной группы Ассура равна: а) W = 1 в) W = 2 б) W = 0 г) W = -1
3.5. Единица измерения углового ускорения звена ε: а) с-2 в) м/с2 б) с2 г) м с2
4.10. Период изменения скорости начального звена при установившемся движении называется: А) циклом б) тактом в) периодом
5.10. Нагрузочная способность конической зубчатой передачи по сравнению с цилиндрической : а) больше б) равны в) меньше
5.20. Напряжения изгиба в зацеплении зубчатых колес возникает: а) у вершины зуба б) у основания зуба в) в месте посадки на вал г) по линии касания зубьев
5.30. Подшипники – это технические устройства, являющиеся частью опор вращающихся осей и валов, воспринимающие радиальные и осевые нагрузки
5.34. Нагрузочная способность роликоподшипников по сравнению с шариковыми подшипниками: А) выше б) ниже в) одинаковы 91. Задание {{ 91 }} ТММ 91 Отметьте правильный ответ Кинематическая пара называется низшей, если элементы звеньев соприкасаются: -: в точке +: по поверхности -: по линии -: по нормали 92. Задание {{ 92 }} ТММ 92 Отметьте правильный ответ Число степеней свободы плоского рычажного механизма можно определить по формуле: +: Чебышева -: Малышева – Сомова -: Озола -: Новикова
93. Задание {{ 93 }} ТММ 93 Дополните Механизм, все подвижные звенья которого описывают неплоские траектории или траектории, лежащие в пересекающихся плоскостях, называется …. Правильные варианты ответа: пространственным 94. Задание {{ 94 }} ТММ 94 Дополните Плоский рычажный механизм, структурная формула которого имеет вид I ® III ® II1 , называется механизмом …. класса Правильные варианты ответа: III (третьего) 95. Задание {{ 95 }} ТММ 95 Отметьте правильный ответ Звено, которому сообщается движение для приведения в движение других звеньев механизма, называется: +: входным -: начальным -: подвижным -: поступательным
96. Задание {{ 96 }} ТММ 96 Отметьте правильный ответ Звено, которому приписывается одна или несколько обобщенных координат механизма, называется: -: входным +: начальным -: подвижным -: поступательным
97. Задание {{ 97 }} ТММ 97 Отметьте правильный ответ Звено плоского рычажного механизма, совершающего вращательное движение, называется: +: кривошипом -: ползуном +: коромыслом -: шатуном
98. Задание {{ 98 }} ТММ 98 Отметьте правильный ответ Звено плоского рычажного механизма, совершающего поступательное движение, называется: -: кривошипом +: ползуном -: коромыслом -: шатуном 99. Задание {{ 99 }} ТММ 99 Дополните Формула Чебышева для определения числа степеней свободы плоского рычажного механизма имеет вид …… Правильные варианты ответа: W = 3n – (2pн + рв) + q 100. Задание {{100 }} ТММ 100 Отметьте правильный ответ Кинематическая пара, имеющая одну связь, называется: -: одноподвижной -: двухподвижной -: трехподвижной -: четырехподвижной +: пятиподвижной 101. Задание {{101}} ТММ 101 Отметьте правильный ответ Кинематическая пара, имеющая две связи, называется: -: одноподвижной -: двухподвижной -: трехподвижной +: четырехподвижной -: пятиподвижной 102. Задание {{102 }} ТММ 102 Отметьте правильный ответ Кинематическая пара, имеющая три связи, называется: -: одноподвижной -: двухподвижной +: трехподвижной -: четырехподвижной -: пятиподвижной 103. Задание {{103 }} ТММ 103 Отметьте правильный ответ Кинематическая пара, имеющая четыре связи, называется: -: одноподвижной +: двухподвижной -: трехподвижной -: четырехподвижной -: пятиподвижной 104. Задание {{104 }} ТММ 104 Отметьте правильный ответ Кинематическая пара, имеющая пять связей, называется: +: одноподвижной -: двухподвижной -: трехподвижной -: четырехподвижной -: пятиподвижной 105. Задание {{105 }} ТММ 105 Отметьте правильный ответ Формула Чебышева для расчета плоского механизма имеет вид: +: W = 3n – (2pн +рв) + q -: W = 3n – (2pн +рв) – q -: W = 6n – (2pн +рв) + q -: W = 6n – (2pн +рв) – q
106. Задание {{106 }} ТММ 106 Дополните Степень подвижности механизма W = …..
Правильные варианты ответов: W = 1 107. Задание {{107 }} ТММ 107 Дополнить Механизм ….. класса имеет формулу строения вида: I → III → II → II Правильные варианты ответов: III (третьего)
108. Задание {{108 }} ТММ 108 Дополнить Количество кинематических пар механизма поворота формовочной машины р = ….
Правильные варианты ответов: р = 7
109. Задание {{109 }} ТММ 109 Дополнить Количество подвижных звеньев механизма поворота щековой дробилки n = ….
Правильные варианты ответов: n = 5
110. Задание {{110 }} ТММ 110 Дополнить Число высших (рв) кинематических
пар механизма рв = ….
Правильные варианты ответов: рв = 2
111. Задание {{111 }} ТММ 111 Отметьте правильный ответ Степень подвижности структурной группы Ассура первого класса: -: W = 1 +:W = 0 -: W = 2 -: W ³ 2
112. Задание {{112 }} ТММ 112 Отметьте правильный ответ Степень подвижности структурной группы Ассура второго класса: -: W = 1 +:W = 0 -: W = 2 -: W ³ 2
113. Задание {{113 }} ТММ 113 Отметьте правильный ответ Признаками классификации кинематических пар являются: +: характер соприкосновения звеньев -: характер движения звеньев +: число степеней свободы -: наличие избыточных связей
114. Задание {{ 114 }} ТММ 114 Отметьте правильный ответ Понятие «активные» относится к силам: +: движущим +: полезного сопротивления +: сопротивления среды -: тяжести -: взаимодействия звеньев
115. Задание {{ 115 }} ТММ 115 Отметьте правильный ответ Понятие «пассивные» относится к силам: -: движущим -: полезного сопротивления -: сопротивления среды +: тяжести -: взаимодействия звеньев
116. Задание {{ 116 }} ТММ 116 Отметьте правильный ответ Понятие «внутренние» относится к силам: -: движущим -: полезного сопротивления -: сопротивления среды -: тяжести +: взаимодействия звеньев
117. Задание {{ 117 }} ТММ 117 Отметьте правильный ответ Уравнение для расчета приведенного момента сил, приложенных к j-му звену, совершающему поступательное движение, в обобщенной форме имеет вид: +: -: -: -: 118. Задание {{ 118 }} ТММ 118 Отметьте правильный ответ Формула для расчета мощности, затрачиваемой на преодоление сил трения в поступательной паре… +: N = Fn ∙f ∙ v -: N = Fn ∙f ∙ v2 -: N = Fn ∙f ∙ r ∙ w -: N = Fn ∙f ∙ r ∙ w2
119. Задание {{ 119 }} ТММ 119 Отметьте правильный ответ Формула для расчета мощности, затрачиваемой на преодоление сил трения во вращателной паре… -: N = Fn ∙f ∙ v -: N = Fn ∙f ∙ v2 +: N = Fn ∙f ∙ r ∙ w -: N = Fn ∙f ∙ r ∙ w2
119. Задание {{ 119 }} ТММ 119 Отметьте правильный ответ Вектор силы трения направлен противоположно вектору : +: скорости -: ускорения -: угловой скорости -: тяжести
120. Задание {{ 120 }} ТММ 120 Отметьте правильный ответ Направление вектора силы трения по отношению вектора скорости: -: совпадают +: противоположны -: перпендикулярны -: располагаются под некоторым углом
121. Задание {{ 121 }} ТММ 121 Отметьте правильный ответ Уравнение для определения кинетической энергии звена, совершающего вращательное движение, имеет вид: -: +: -: -:
122. Задание {{ 122 }} ТММ 122 Отметьте правильный ответ Уравнение для определения кинетической энергии звена, совершающего поступательное движение, имеет вид: +: -: -: -:
123. Задание {{ 123 }} ТММ 123 Отметьте правильный ответ Уравнение для расчета коэффициента неравномерности хода механизма имеет вид: +: -: -: -:
124. Задание {{ 124 }} ТММ 124 Дополните Зубчатые цилиндрические передачи относятся к передачам с ……расположением осей Правильные варианты ответов: параллельным
125. Задание {{ 125 }} ТММ 125 Отметьте правильный ответ При числе зубьев нарезаемого колеса Z < Zmin величина назначаемого коэффициента смещения: -: Х = 0 -:Х < 0 +:Х > 0
126. Задание {{ 126 }} ТММ 126 Отметьте правильный ответ При числе зубьев нарезаемого колеса Z = Zmin величина назначаемого коэффициента смещения: +: Х = 0 -:Х < 0 +:Х > 0 127. Задание {{ 127 }} ТММ 127 Отметьте правильный ответ Для нормальной работы цилиндрической зубчатой передачи величина коэффициента торцевого перекрытия εα должна быть: -: εα < 1 +: εα > 1 -: εα = 1 -: εα = 0
128. Задание {{ 128 }} ТММ 128 Отметьте правильный ответ Окружность зубчатого колеса, имеющая шаг, модуль и угол профиля, равная шагу, модулю и углу профиля исходного производящего контура, называется: +: делительной -: основной -: вершин зубьев -: впадин зубьев
129. Задание {{ 129 }} ТММ 129 Дополнить Окружность зубчатого колеса, имеющая шаг, модуль и угол профиля, равные шагу, модулю и углу профиля исходного производящего контура, называется ……… Правильные варианты ответов: делительной
130. Задание {{ 130 }} ТММ 130 Дополнить Коническая зубчатая передача, в которой угол между осями колес равен 900, называется …… Правильные варианты ответов: ортогональной 131. Задание {{ 131 }} ТММ 131 Отметьте правильный ответ Коническая зубчатая передача, в которой угол между осями колес равен 900, называется: +: ортогональной -: косозубой -: прямозубой -: круглозубой
132. Задание {{ 132 }} ТММ 132 Отметьте правильный ответ Шаг зубчатого колеса по делительной окружности определяется уравнением: +: р = π · m -: р = π / m -: р = m / π -: р = 2 π m 133. Задание {{ 133 }} ТММ 133 Дополнить Шаг зубчатого колеса по делительной окружности определяется уравнением …… Правильные варианты ответов: р = π · m 134. Задание {{ 134 }} ТММ 134 Отметьте правильный ответ Диаметр делительной окружности зубчатого колеса определяется по формуле: +: d = m Z -: d = m (Z + 2ha) -: d = m (Z + 2ha + 2X) -: d = (m Z) / 2 135. Задание {{ 135 }} ТММ 135 Дополнить Диаметр делительной окружности зубчатого колеса определяется по формуле ….. Правильные варианты ответов: d = m Z 136. Задание {{ 136 }} ТММ 136 Отметьте правильный ответ Диаметр окружности вершин цилиндрического зубчатого колеса определяется по формуле: -: d = m (Z + 2,5ha) +: d = m (Z + 2ha) -: d = m (Z – 2,5ha) -: d = (m (Z – 2ha)
137. Задание {{ 137 }} ТММ 137 Отметьте правильный ответ Диаметр окружности впадин цилиндрического зубчатого колеса определяется по формуле: -: d = m (Z + 2,5ha) -: d = m (Z + 2ha) +: d = m (Z – 2,5ha) -: d = (m (Z – 2ha) 138. Задание {{ 138 }} ТММ 138 Отметьте правильный ответ Расположение делительной прямой режущего инструмента и делительной окружности нарезаемого колеса при положительном смещении режущего инструмента (Х>0): +: не имеют общих точек -: пересекаются в 2-х точках -: касаются в 1 точке -: взаимно перпендикулярны 139. Задание {{ 139 }} ТММ 139 Отметьте правильный ответ Расположение делительной прямой режущего инструмента и делительной окружности нарезаемого колеса при отрицательном смещении режущего инструмента (Х<0): -: не имеют общих точек +: пересекаются в 2-х точках -: касаются в 1 точке -: взаимно перпендикулярны 140. Задание {{ 140 }} ТММ 140 Отметьте правильный ответ Расположение делительной прямой режущего инструмента и делительной окружности нарезаемого колеса при нулевом смещении режущего инструмента (Х=0): -: не имеют общих точек -: пересекаются в 2-х точках +: касаются в 1 точке -: взаимно перпендикулярны 141. Задание {{ 141 }} ТММ 141 Отметьте правильный ответ Закон движения выходного звена кулачкового механизма с "мягким" ударом называется: -: линейныым +: параболическим -:синусоидальным +:косинусоидальным 142. Задание {{ 142 }} ТММ 142 Отметьте правильный ответ Закон движения выходного звена кулачкового механизма с "жестким" ударом называется: +: линейныым -: параболическим -:синусоидальным -:косинусоидальным
143. Задание {{ 143 }} ТММ 143 Отметьте правильный ответ Закон движения выходного звена кулачкового механизма без удара называется: -: линейныым -: параболическим +:синусоидальным -:косинусоидальным
144. Задание {{ 144 }} ТММ 144 Отметьте правильный ответ Основной характеристикой кулачкового механизма является: -:профиль кулачка +:закон движения толкателя -:угловая скорость вращения кулачка -:вид толкателя
145. Задание {{ 145 }} Тмм 145 Отметьте правильный ответ Преимущественное использование в кулачковых механизмах толкателей с роликовым наконечником связано с: +: уменьшением трения -: возможностью быстрой замены ролика при изнашивании -: снижением шума -: исключением заклинивания
146. Задание {{ 146 }} Тмм 146 Отметьте правильный ответ Способы замыкания кулачковых механизмов: +: силовой +: геометрический -: механический -: фрикционный
147. Задание {{ 147 }} Тмм 147 Дополните Способы замыкания кулачковых механизмов – геометрический и …… Правильные варианты ответа: силовой
148. Задание {{ 148 }} Тмм 148 Дополните Способы замыкания кулачковых механизмов – силовой и …… Правильные варианты ответа: геометрический
149. Задание {{ 149 }} Тмм 149 Отметьте правильный ответ Рабочий цикл кулачкового механизма состоит из фаз: +: удаления толкателя +: верхнего выстоя толкателя +: приближения толкателя -: нижнего выстоя толкателя
150. Задание {{ 150 }} Тмм 150 Отметьте правильный ответ Величина угла давления n в кулачковой механизме зависит от: +: размеров механизма +: передаточной функции +: перемещения толкателя -: вида толкателя
151. Задание {{ 151 }} Тмм 1451 Отметьте правильный ответ Ограничения по углу давления для кулачковых механизмов с коромысловым толкателем: -: nдоп = 30…150 +: nдоп = 45…200 -: nдоп = 900 -: nдоп = 0
152. Задание {{ 152 }} Тмм 152 Отметьте правильный ответ Ограничения по углу давления для кулачковых механизмов с поступательно движущимся толкателем: +: nдоп = 30…150 -: nдоп = 45…200 -: nдоп = 900 -: nдоп = 0 153. Задание {{ 153 }} Тмм 153 Отметьте правильный ответ Ограничения по углу давления для кулачковых механизмов с тарельчатым толкателем: -: nдоп = 30…150 -: nдоп = 45…200 -: nдоп = 450 +: nдоп = 0 154. Задание {{ 154 }} Тмм 154 Отметьте правильный ответ Диаграмму перемещения толкателя кулачкового механизма получают путем графического ……. диаграммы аналога скорости толкателя: +: интегрирования -: дифференцирования -: экстраполирования -: суммирования
155. Задание {{ 155 }} Тмм 155 Отметьте правильный ответ При графическом определении координат профиля кулачка теоретический профиль определяется для кулачковых механизмов: +: с роликовым толкателем -: с остроконечным толкателем -: с тарельчатым толкателем -: со сферическим толкателем
156. Задание {{ 156 }} Тмм 156 Дополните При графическом определении координат профиля кулачка теоретический профиль определяется для кулачковых механизмов с …… толкателем Правильные варианты ответа: роликовым 157. Задание {{ 157 }} Тмм 157 Дополните При проектировании кулачковых механизмов с тарельчатым толкателем кулачок должен отвечать требованию ….. профиля Правильные варианты ответа: выпуклости
158. Задание {{ 158 }} Тмм 158 Отметьте правильный ответ При проектировании кулачковых механизмов с тарельчатым толкателем профиль кулачка должен отвечать требованию: +: выпуклости -: симметричности -: замкнутости -: геометричности
159. Задание {{ 159 }} Тмм 159 Отметьте правильный ответ Условие статической уравновешенности механизма имеет вид: -: Фå ¹ 0 +: Фå = 0 -: МФå ¹ 0 -: МФå = 0
160. Задание {{ 160 }} Тмм 160 Отметьте правильный ответ Условие моментной неуравновешенности механизма имеет вид: -: Фå ¹ 0 -: Фå = 0 +: МФå ¹ 0 -: МФå = 0
161. Задание {{ 161 }} Тмм 161 Отметьте правильный ответ При статической уравновешенности механизмов центр масс системы подвижных звеньев должен быть: +: неподвижен -: уравновешен -: приложен к стойке -: приложен к начальному звену
162. Задание {{ 162 }} Тмм 162 Дополните При статической уравновешенности механизмов центр масс системы подвижных звеньев должен быть….. Правильные варианты ответа: неподвижен
163. Задание {{ 163 }} Тмм 163 Отметьте правильный ответ Для статического уравновешивания звеньев применяются: +: противовесы -: пружина -: маховик
164. Задание {{ 164 }} Тмм 164 Дополните Для статического уравновешивания звеньев механизма применяются…… Правильные варианты ответа: противовесы
165. Задание {{ 165 }} Тмм 165 Дополните Виды неуравновешенности ротора: статическая и …… Правильные варианты ответа: динамическая
166. Задание {{ 166 }} Тмм 166 Дополните Виды неуравновешенности ротора: динамическая и …… Правильные варианты ответа: статическая
167. Задание {{ 167 }} Тмм 167 Отметьте правильный ответ Неуравновешенность ротора вызывает: +: повышение динамических нагрузок на опоры -: неравномерность вращения главного вала -: уменьшение угловой скорости вращения главного вала -: увеличение угловой скорости вращения главного вала
168. Задание {{ 168 }} Тмм 168 Дополните Неуравновешенность ротора вызывает …….. динамических нагрузок на опоры Правильные варианты ответа: «повышение» или «увеличение»
169. Задание {{ 169 }} Тмм 169 Отметьте правильный ответ Уравнение для расчета модуля главного вектора сил инерции неуравновешенного ротора: +: Ф = w2 Dcт -: Ф = (w Dcт) -: Ф = w2 / Dcт -: Ф = 2w Dcт
170. Задание {{ 170 }} Тмм 170 Отметьте правильный ответ Совпадение частоты вынужденных колебаний механизма с частотой собственных колебаний называется: +: резонансом -: диссонансом -: вибрацией -: амортизацией
171. Задание {{ 171 }} Тмм 171 Отметьте правильный ответ Для статического уравновешивания механизмов используют метод: +: заменяющих масс -: Виттенбауэра -: приведения масс -: рычага Жуковского
172. Задание {{ 172 }} Тмм 172 Отметьте правильный ответ Сбалансированный ротор при изменений угловой скорости начального звена: +: остается уравновешенным -: перестает быть уравновешенным -: меняет положение центра масс
173. Задание {{ 173 }} Тмм 173 Дополните Кинематическая пара называется высшей, если элементы звеньев соприкасаются ….. Правильные варианты ответа: по линии или в точке
174. Задание {{ 174 }} Тмм 174 Дополните Число степеней свободы пространственного механизма определяется по формуле….. Правильные варианты ответа: Малышева - Сомова
175. Задание {{ 175 }} Тмм 175 Дополните Звено, которому сообщается движение для приведения в движение других звеньев механизма, называется ….. Правильные варианты ответа: входным
176. Задание {{ 176 }} Тмм 176 Дополните Степень подвижности механизма первого класса W = ….. Правильные варианты ответа: 1
177. Задание {{ 177 }} Тмм 177 Дополните Степень подвижности структурной группы Ассура первого класса W = ….. Правильные варианты ответа: 0
178. Задание {{ 178 }} Тмм 178 Отметьте правильный ответ Передаточное отношение многоступенчатой передачи равно….. передаточных отношений отдельных одноступенчатых передач, образующих эту передачу: +: произведению -: отношению -: сумме -: разности
179. Задание {{ 179 }} Тмм 179 Дополните Нормальная составляющая ускорения точки, принадлежащей звену, совершающему плоскопараллельное движение, определится уравнением…….. Правильные варианты ответа: аn = w2L
180. Задание {{ 180 }} Тмм 180 Дополните Тангенциальнальная составляющая ускорения точки, принадлежащей звену, совершающему плоскопараллельное движение, определится уравнением…….. Правильные варианты ответа: аτ = εL
181. Задание {{ 181 }} Тмм 181 Отметьте правильный ответ Силовой расчет механизмов с учетом сил инерции звеньев называется: +: кинетостатическим -: силовым -: инерционным -: уравновешивающим
182. Задание {{ 182 }} Тмм 182 Дополните Уравновешивающая сила приложена к ………. звену механизма Правильные варианты ответа: начальному
183. Задание {{ 183 }} Тмм 183 Дополните Кинетостатический метод расчета механизмов основан на учете сил и моментов ……….. звеньев Правильные варианты ответа: инерции
184. Задание {{ 184 }} Тмм 184 Дополните Сила взаимодействия звеньев с учетом трения отклоняется от их общей номали на величину угла ……. Правильные варианты ответа: трения
185. Задание {{ 185 }} Тмм 185 Дополните Для определения величины неизвестной силы при силовом анализе механизма используется метод рычага …… Правильные варианты ответа: Жуковского
186. Задание {{ 186 }} Тмм 186 Дополните При силовом анализе механизма методом Жуковского в качестве рычага Жуковского используется полюс повернутого плана …… Правильные варианты ответа: скоростей
187. Задание {{ 187 }} Тмм 187 Дополните Единица измерения приведенного момента инерции Jп ……. Правильные варианты ответа: кг · м2
188. Задание {{ 188 }} Тмм 188 Дополните Вектор силы трения направлен противоположно вектору …….. Правильные варианты ответа: скорости
189. Задание {{ 189 }} Тмм 189 Отметьте правильный ответ Вектор силы трения направлен противоположно вектору : +: скорости -: ускорения -: угловой скорости -: тяжести
190. Задание {{ 190 }} Тмм 190 Отметьте правильный ответ Уравнение движение машинного агрегата в энергетической форме имеет вид: +: -: -: -:
191. Задание {{ 191 }} Тмм 191 Отметьте правильный ответ Уравнение для расчета момента инерции маховика для начального положения имеет вид: +: -: -: -:
192. Задание {{ 192 }} Тмм 192 Дополните Формула Герца применяется при проверочном расчете зубчатых колес по ……. напряжениям Правильные варианты ответа: контактным
193. Задание {{ 193 }} Тмм 193 Дополните При проверочном расчете зубчатых колес по контактным напряжения применяется формула ……… (фамилия ученого) Правильные варианты ответа: Герца
194. Задание {{ 194 }} Тмм 194 Отметьте правильный ответ Увеличение коэффициента смещения при нарезке зубчатого колеса до некоторого Хmax может привести к ………. головки зуба: +: заострению -: расширению -: срезанию -: поломке
195. Задание {{ 195 }} Тмм 195 Отметьте правильный ответ Уменьшение коэффициента смещения при нарезке зубчатого колеса до некоторого Хmin может привести к ………. ножки зуба: +: подрезанию -: утолщению -: поломке -: заклиниванию
196. Задание {{ 196 }} Тмм 196 Дополните Основная теорема плоского зацепления, определяющая положение полюса зацепления, носит название теоремы ……… (фамилия ученого) Правильные варианты ответа: Виллиса
197. Задание {{ 197 }} Тмм 173 Дополните Для уменьшения трения в кулачковых механизмах используют толкатели с ……. наконечником Правильные варианты ответа: роликовым
198. Задание {{ 198 }} Тмм 198 Дополните Диаграмму перемещения толкателя кулачкового механизма получают графическим ………. графика аналога скорости толкателя Правильные варианты ответа: интегрированием
199. Задание {{ 199 }} Тмм 199 Дополните Величина угла давления в кулачковых механизмах с тарельчатым толкателем υ = ……. Правильные варианты ответа: 0
200. Задание {{ 200 }} Тмм 200 Дополните Зубчатое зацепление, при котором угловые скорости вращения колес W1 и W2 имеют разные знаки, называется …….. Правильные варианты ответа: внешним РАЗДЕЛ 1
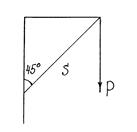
1.1. Найти проекцию силы Р на ось Х:
*а) Х=0 б) Х=Р в) Х= -Р
1.2. Найти усилие S в стержне:
а) S=0 б) S=P *в) S=P/ cos 45˚
1.3. Найти реакцию Х опоры А:
а) Р=Р б) Р=-Р *в) Р=-Р cos 45˚
1.4. Найти момент силы Р относительно оси У:
а) *б) Ρ=(Р cos α) h в) P=P sin α
1.5. Найти реакцию Х от действия силы Р:
а) Х= Р *б) Х= 0 в) Х= -Р
1.6. Найти момент силы F относительно точки Р:
а) *б) в)
1.7. Найти проекцию силы Р на ось Х:
а) Х=0 *б) Х=Р в) Х= -Р
1.8. Найти момент инерции сечения:
*а) б) в)
1.9. Найти координаты центра тяжести сложного сечения:
*а) б) в) 1.10. Найти усилие S в стержне:
*а) S=P б) в)
РАЗДЕЛ 2
2.1. Определить реакцию опор
а) *б) в)
2.2. Произвести расчет вала на статическую прочность:
а) *б) в)
а) а=5 мм *б) а=10 мм в) а=15 мм
2.4. Определить сечение проволоки при действии статически приложенной растягивающей силы F:
а) б)
*в)
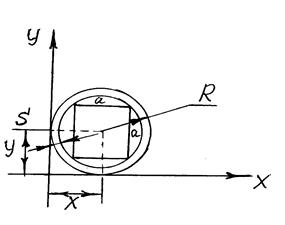
2.5. Построить эпюру изгибающих моментов:
2.6. Определить центр тяжести сечения:
а) Х=У У=R б) X=2У У=R * в) Х=R У=R
2.7.Определить реакцию жесткой заделки:
а) Х=0 У=Р М=Рl *б) Х=-Р У=0 М=Рl в) Х=Р У=Р М=0 2.8. Величина изгибающего момента балки, нагруженной силами Р1 и Р2 при l=1м, Р
а) *б) в)
2.9. Величина окружной силы Ft в зубчатом зацеплении определится по формуле:
*а) Ft = б) Ft = в) ) Ft =
2.10. Средний диаметр вала определится по формуле:
а) *б)
в)
РАЗДЕЛ 3
3.1. Модуль зацепления определяется по формуле: *а) б) в)
3.2. Кулачковый механизм служит: а) для преобразования энергии, *б) преобразования движения, в) преобразования массы тела.
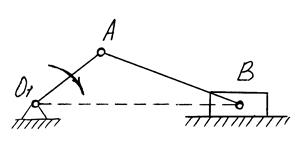
3.3. Вектор абсолютной скорости точки В будет направлен:
а) перпендикулярно ходу ползуна *б) параллельно ходу ползуна в) перпендикулярно звену АВ г) параллельно звену АВ
3.4. Маховик служит для: а) увеличения массы системы, *б) снижения неравномерности вращения ведущего звена, в) отсутствие эффекта резонанса в системе.
3.5 . Линия зацепления это: *а) геометрическое место точек контакта зубьев от момента начала зацепления до его окончания, б) касательная к делительным окружностям, в) линия, расположенная под углом зацепления к межосевой линии.
3.6. Динамическая балансировка проводится: а) на специальных балансировочных стендах, *б) на балансировочных станках, в) на специальных роликовых балансирах.
3.7. Передаточное число зубчатого механизма равно: а) *б) в)
3.8. Последовательность фаз движения толкателя кулачкового механизма : *а) подъем, верхний выстой, опускание, нижний выстой, б) подъем, верхний выстой, опускание, в) нижний выстой, опускание, верхний выстой.
3.9. Крайние положения механизма это: а) верхнее и нижнее положение ведомого звена, б) предельные положения ведущего звена механизма, *в) предельные положения ведомого звена механизма.
3.10. Шестерней называют: *а) ведущее звено зубчатого механизма, б) ведомое звено зубчатого механизма, в) ведущее и ведомое звено зубчатого механизма.
РАЗДЕЛ 4
4.1. Основным критерием при расчете ременной передачи является: а) прочность шкивов, *б) тяговая способность ремней, в) износостойкость ремней.
4.2. Стандартные муфты выбирают: а) по частоте вращения соединяемых валов, *б) по передаваемым крутящим моментам, в) по режиму эксплуатации. 4.3. Для стопорения резьбовых соединений применяют: а) пружины, б) шпонки, *в) пружинные шайбы.
4.4. Из двух обозначений, выбитых на подшипнике качения, информацию о конструкции, серии и размерах подшипника содержат надписи: а) 4 ГПЗ, *б) 308, в) 4 ГПЗ, 308
4.5. Угол профиля метрической резьбы составляет: а) 55˚ б) 45˚ *в) 60˚.
4.6. Предварительное натяжение ремня ременной передачи: а) увеличивает долговечность ремня, *б) требуется для осуществления сцепления ремня со шкивом, в) требуется при больших скоростях ремня.
4.7. Шпонки на валу осуществляют: а) Фиксацию вала в осевом направлении, б) передачу угловой скорости от ступицы к валу, *в) передачу крутящего момента от вала к ступице.
4.8. Условием прочности зубчатых колес на изгиб является: а) *б) в)
4.9. Коэффициент долговечности зубчатой передачи это: *а) КНL , (ZN) б) ZNX , (KH) в) K
4.10. Сила растяжения болта при расчете резьбы под действием внешних сил, открывающих стык детали, равна: *а) Fp= 1,3 Fзат + б) Fp= Fзат в) Fp= 1,2 Fзат -
РАЗДЕЛ 5
5.1. Прямая и обратная задача динамики связывает: а) известный закон движения и искомые действующие силы, б) закон движения и известные действующие силы, *в) закон движения и действующие силы.
5.2. Кинематика рассматривает: а) действие сил и моментов сил, б) действие динамических нагрузок, *в) законы движения твердых тел.
5.3. Момент пары сил это: *а) произведение силы на плечо пары сил, б) разность сил, образующих пару, в) произведение силы на коэффициент парности сил.
5.4. Замена распределенной нагрузки q, действующей на балку сосредоточенной силой Q, производится путем решения равенства: *а) Q= ql б) Q= в) Q =
5.5. Модуль зацепления: *а) определяет размер зуба, б) влияет на износ зубьев, в) оказывает влияние на точность зацепления.
5.6. Формирование эвольвенты осуществляется: а) движением окружности по прямой, *б) движением касательной по основной окружности, в) движением касательной по двум основным окружностям. 5.7. Смещение инструмента при нарезании зубьев методом обкатки служит: *а) для исключения подрезания ножки зуба, б) для появления заострения головки зуба, в) для повышения точности при нарезании зубьев.
5.8. Модуль зубчатого зацепления имеет размерность: а) безразмерная величина, *б) мм, в) определяется стандартом в зависимости от точности зацепления.
5.9. Момент инерции тела измеряется в единицах: а) мм, б) н м2, *в) кгм2.
5.10. Единицей измерения крутящего момента является: а) Нм2, б) *в) Нм.
|























































 2.3.Определить размер сечения при действии растягивающей силы Р=10 Н,
2.3.Определить размер сечения при действии растягивающей силы Р=10 Н, 







 =7 кН,
=7 кН,  =1 кН,
=1 кН, 















 =
= 

 1-
1-  >
> 



 (KH
(KH  )
) Fа
Fа

