| ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса - ваш вокал Игровые автоматы с быстрым выводом Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Вкуснейший "Салат из свеклы с чесноком" Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека - Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
| Вычислительный эксперимент
3.1 S – модель регулятора Уатта
Использование S-моделей обеспечивает следующие преимущества: · Эффективный метод создания программ моделирования сложных динамических систем, который заключается в сборке блок-схемы системы из стандартных готовых блоков (визуальное программирование); · Удобные и наглядные средства, позволяющие преобразовать готовую блок-схему или получить дополнительную информацию об изменении промежуточных процессов; · Широкий набор эффективных программ решателей (Solvers), реализующих метолы численного интегрирования дифференциальных уравнений с фиксированным шагом интегрирования, с переменным шагом интегрирования, а также решателей для так называемых жестких систем дифференциальных уравнений; · Отсутствие необходимости в специальной организации процесса численного интегрирования; · Уникальные возможности интегрирования нелинейных систем с существенными «нелинейностями» (когда нелинейная зависимость имеет скачкообразный характер); · Возможность весьма быстрого и удобного получения графической информации об изменении моделируемых величин по аргументу (времени).
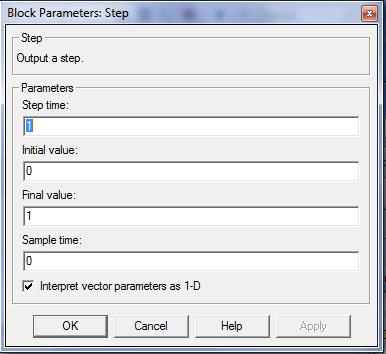
Блок Step генерирует сигнал в виде ступеньки (ступенчатый сигнал) с заданными параметрами. Окно его настройки
В диалоговом окне настройки блока Step устанавливаются следующие параметры: Step time – время начала ступеньки или момент скачкообразного изменения величины вырабатываемого сигнала; Initial value – начальный уровень сигнала или значение сигнала до его скачка; Final value – конечный уровень сигнала или значение сигнала после скачка; Sample time – величина дискрета времени для данного блока (указывается только для дискретных блоков).
Блок Gain служит линейным усилительным звеном. Окно его настройки имеет следующий вид
Блок осуществляет умножение входного сигнала на постоянную величину (или вектор), значение которой (элементы которого) задаются в диалогом окне настройки в поле Gain (Коэффициент усиления). Входная величина блока может быть скалярной, векторной или матричной. В случае, когда входной сигнал является вектором длиной N элементов, коэффициент усиления должен быть векторной той же длины. В списке Multiplication (Умножение) выбирается один из следующих способов умножения входной величины на вектор k коэффициентов усиления: Element wise – поэлементное умножение вектора коэффициентов усиления; Matrix (K*u) – матричное умножение вектора коэффициентов усиления на матрицу входной величины; Matrix (u*K) - матричное умножение матрицы входной величины на вектор коэффициентов усиления; Matrix (K*u)(u vector) – матричное умножение векторов K и u. Настраивается один параметр: коэффициент усиления входного сигнала.
Блок Transfer FCN – дискретная передаточная функция, формирует модель в виде передаточной функции дискретной системы, представленной в форме дробно-рациональной функции (отношение двух многочленов). Многочлены располагаются в порядке убывания степеней переменной z. Окно его настройки имеет вид
Блок передаточной характеристики Transfer Fcn задает передаточную функцию в виде отношения полиномов:
где nn и nd – порядок числителя и знаменателя передаточной функции, num – вектор или матрица коэффициентов числителя, den – вектор коэффициентов знаменателя. Параметры: Numerator — вектор или матрица коэффициентов полинома числителя Denominator -вектор коэффициентов полинома знаменателя Absolute tolerance — Абсолютная погрешность. Порядок числителя не должен превышать порядок знаменателя. Входной сигнал блока должен быть скалярным. В том случае, если коэффициенты числителя заданы вектором, то выходной сигнал блока будет также скалярным (как и входной сигнал). Если коэффициенты числителя заданы матрицей, то блок Transfer Fcn моделирует векторную передаточную функцию, которую можно интерпретировать как несколько передаточных функций имеющих одинаковые полиномы знаменателя, но разные полиномы числителя. При этом выходной сигнал блока является векторным и количество строк матрицы числителя задает размерность выходного сигнала. Осциллограф Scope Назначение: Строит графики исследуемых сигналов в функции времени. Позволяет наблюдать за изменениями сигналов в процессе моделирования. Для того, чтобы открыть окно просмотра сигналов необходимо выполнить двойной щелчок левой клавишей “мыши” на изображении блока. Это можно сделать на любом этапе расчета (как до начала расчета, так и после него, а также во время расчета). В том случае, если на вход блока поступает векторный сигнал, то кривая для каждого элемента вектора строится отдельным цветом. Настройка окна осциллографа выполняется с помощью панелей инструментов (рис.)
Рис. Панель инструментов блока Scope
Панель инструментов содержит 11 кнопок: Print – печать содержимого окна осциллографа. Parameters – доступ к окну настройки параметров. Zoom – увеличение масштаба по обеим осям. Zoom X-axis – увеличение масштаба по горизонтальной оси. Zoom Y-axis – увеличение масштаба по вертикальной оси. Autoscale – автоматическая установка масштабов по обеим осям. Save current axes settings – сохранение текущих настроек окна. Restore saved axes settings – установка ранее сохраненных настроек окна. Floating scope – перевод осциллографа в “свободный” режим. Lock/Unlock axes selection – закрепить/разорвать связь между текущей координатной системой окна и отображаемым сигналом. Инструмент доступен, если включен режим Floating scope. Signal selection – выбор сигналов для отображения. Инструмент доступен, если включен режим Floating scope. Установка параметров расчета и его выполнение Перед выполнением расчетов необходимо предварительно задать параметры расчета. Задание параметров расчета выполняется в панели управления меню Simulation/Parameters. Вид панели управления приведен на Рис.
Рис. Панель управления
Окно настройки параметров расчета имеет 4 вкладки: Solver (Расчет) — Установка параметров расчета модели. Workspace I/O (Ввод/вывод данных в рабочую область) — Установка параметров обмена данными с рабочей областью MATLAB. Diagnostics (Диагностика) — Выбор параметров диагностического режима. Advanced (Дополнительно) — Установка дополнительных параметров. Установка параметров расчета модели выполняется с помощью элементов управления, размещенных на вкладке Solver. Эти элементы разделены на три группы: Simulation time (Интервал моделирования или, иными словами, время расчета), Solver options (Параметры расчета), Output options (Параметры вывода). Установка параметров расчета модели Simulation time (Интервал моделирования или время расчета) Время расчета задается указанием начального (Start time) и конечного (Stop time) значений времени расчета. Начальное время, как правило, задается равным нулю. Величина конечного времени задается пользователем исходя из условий решаемой задачи. Solver options (Параметры расчета) При выборе параметров расчета необходимо указать способ моделирования (Type) и метод расчета нового состояния системы. Для параметра Type доступны два варианта - c фиксированным (Fixed-step) или с переменным (Variable-step) шагом. Как правило, Variable-step используется для моделирования непрерывных систем, a Fixed-step - для дискретных. Список методов расчета нового состояния системы содержит несколько вариантов. Первый вариант (discrete) используется для расчета дискретных систем. Остальные методы используются для расчета непрерывных систем. Эти методы различны для переменного (Variable-step) и для фиксированного (Fixed-step) шага времени, но, по сути, представляют собой процедуры решения систем дифференциальных уравнений. Подробное описание каждого из методов расчета состояний системы приведено во встроенной справочной системе MATLAB. Ниже двух раскрывающихся списков Type находится область, содержимое которой меняется зависимости от выбранного способа изменения модельного времени. При выборе Fixed-step в данной области появляется текстовое поле Fixed-step size (величина фиксированного шага) позволяющее указывать величину шага моделирования (см. рис. 7.2). Величина шага моделирования по умолчанию устанавливается системой автоматически (auto). Требуемая величина шага может быть введена вместо значения auto либо в форме числа, либо в виде вычисляемого выражения (то же самое относится и ко всем параметрам устанавливаемым системой автоматически).
Рис. Вкладка Solver при выборе фиксированного шага расчета
При выборе Fixed-step необходимо также задать режим расчета (Mode). Для параметра Mode доступны три варианта: MultiTasking (Многозадачный) – необходимо использовать, если в модели присутствуют параллельно работающие подсистемы, и результат работы модели зависит от временных параметров этих подсистем. Режим позволяет выявить несоответствие скорости и дискретности сигналов, пересылаемых блоками друг другу. SingleTasking (Однозадачный) - используется для тех моделей, в которых недостаточно строгая синхронизация работы отдельных составляющих не влияет на конечный результат моделирования. Auto (Автоматический выбор режима) - позволяет Simulink автоматически устанавливать режим MultiTasking для тех моделей, в которых используются блоки с различными скоростями передачи сигналов и режим SingleTasking для моделей, в которых содержатся блоки, оперирующие одинаковыми скоростями. При выборе Variable-step в области появляются поля для установки трех параметров: Мах step size - максимальный шаг расчета. По умолчанию он устанавливается автоматически (auto) и его значение в этом случае равно (SfopTime — StartTime)/50. Довольно часто это значение оказывается слишком большим, и наблюдаемые графики представляют собой ломаные (а не плавные) линии. В этом случае величину максимального шага расчета необходимо задавать явным образом. Мin step size - минимальный шаг расчета. Initial step size - начальное значение шага моделирования. При моделировании непрерывных систем с использованием переменного шага необходимо указать точность вычислений: относительную (Relative tolerance) и абсолютную (Absolute tolerance). По умолчанию они равны соответственно 10-3 и auto. Output options (Параметры вывода) В нижней части вкладки Solver задаются настройки параметров вывода выходных сигналов моделируемой системы (Output options). Для данного параметра возможен выбор одного из трех вариантов: Refine output (Скорректированный вывод) – позволяет изменять дискретность регистрации модельного времени и тех сигналов, которые сохраняются в рабочей области MATLAB с помощью блока То Workspace. Установка величины дискретности выполняется в строке редактирования Refine factor, расположенной справа. По умолчанию зна чение Refine factor равно 1, это означает, что регистрация производится с шагом D t = 1 (то есть для каждого значения модельного времени:). Если задать Refine factor равеным 2, это означает, что будет регистрироваться каждое второе значение сигналов, 3 - каждое третье т. д. Параметр Refine factor может принимать только целые положительные значения Produce additional output (Дополнительный вывод) — обеспечивает дополнительную регистрацию параметров модели в заданные моменты времени; их значения вводятся в строке редактирования (в этом случае она называется Output times) в виде списка, заключенного в квадратные скобки. При использовании этого варианта базовый шаг регистрации (D t) равен 1. Значения времени в списке Output times могут быть дробными числами и иметь любую точность. Produce specified output only (Формировать только заданный вывод) — устанавливает вывод параметров модели только в заданные моменты времени, которые указываются в поле Output times (Моменты времени вывода). Установка параметров обмена с рабочей областью Элементы, позволяющие управлять вводом и выводом в рабочую область MATLAB промежуточных данных и результатов моделирования, расположены на вкладке Workspace I/O (рис.).
Рис. Вкладка Workspace I/O диалогового окна установки параметров моделирования
Элементы вкладки разделены на 3 поля: Load from workspace (Загрузить из рабочей области). Если флажок Input (Входные данные) установлен, то в расположенном справа текстовом поле можно ввести формат данных, которые будут считываться из рабочей области MATLAB. Установка флажка Initial State (Начальное состояние) позволяет ввести в связанном с ним текстовом поле имя переменной, содержащей параметры начального состояния модели. Данные, указанные в полях Input и Initial State, передаются в исполняемую модель посредством одного или более блоков In (из раздела библиотеки Sources). Save to workspace (Записать в рабочую область) – Позволяет установить режим вывода значений сигналов в рабочую область MATLAB и задать их имена. Save options (Параметры записи) – Задает количество строк при передаче переменных в рабочую область. Если флажок Limit rows to last установлен, то в поле ввода можно указать количество передаваемых строк (отсчет строк производится от момента завершения расчета). Если флажок не установлен, то передаются все данные. Параметр Decimation (Исключение) задает шаг записи переменных в рабочую область (аналогично параметру Refine factor вкладки Solver). Параметр Format (формат данных) задает формат передаваемых в рабочую область данных. Доступные форматы Array (Массив), Structure (Структура), Structure With Time (Структура с дополнительным полем – “время”). Установка параметров диагностирования модели Вкладка Diagnostics (рис. 7.4) позволяет изменять перечень диагностических сообщений, выводимых Simulink в командном окне MATLAB, а также устанавливать дополнительные параметры диагностики модели. Сообщения об ошибках или проблемных ситуациях, обнаруженных Simulink в ходе моделирования и требующих вмешательства разработчика выводятся в командном окне MATLAB. Исходный перечень таких ситуаций и вид реакции на них приведен в списке на вкладке Diagnostics. Разработчик может указать вид реакции на каждое из них, используя группу переключателей в поле Action (они становятся доступны, если в списке выбрано одно из событий): None — игнорировать, Warning -— выдать предупреждение и продолжить моделирование, Error — выдать сообщение об ошибке и остановить сеанс моделирования. Выбранный вид реакции отображается в списке рядом с наименованием события.
Рис. Вкладка Diagnostics окна установки параметров моделирования
Выполнение расчета Запуск расчета выполняется с помощью выбора пункта меню Simulation/Start. или инструмента
Блок, характеризующий центробежный маятник
Блок, характеризующий паровую машину
Блок, характеризующий маховик
Блок, характеризующий заслонку
Блок, характеризующий внешнее воздействие
А теперь приступим непосредственно к экспериментам. Поставим произвольные коэффициенты
В окне настройки параметров блоков Transfer Fcn1, Transfer Fcn2, Transfer Fcn3, Transfer Fcn4 зададим следующие параметры
Результаты функционирования такой модели представлены в графическом окне блока Scope
Устойчивость – это свойство системы возвращаться в исходный или близкий к нему установившийся режим после всякого выхода из него в результате какого-либо воздействия. Таким образом, если система неустойчива, то достаточно любого толчка, чтобы в ней начался расходящийся процесс ухода из исходного установившегося состояния. А если система устойчива, то переходный процесс в системе, вызванный каким-либо воздействием, со временем затухает, и система вновь возвращается в устойчивое состояние. Таким образом, при следующих значениях коэффициентов, регулятор работает устойчиво, т.е. при k1=1, k2=1, k3=1, k4=1, k5=1, T1=1, T2=1, T3=1, T4=1.
Поменяем значение коэффициентов. В окне настройки параметров блока Gain зададим следующие параметры
В окне настройки параметров блоков Transfer Fcn1, Transfer Fcn2, Transfer Fcn3, Transfer Fcn4 зададим следующие параметры
Результаты функционирования такой модели представлены в графическом окне блока Scope
При значениях коэффициентов k1=10, k2=4, k3=1, k4=1, k5=0.2, T12=0.001, T2=0.2, T3=5, T4=T5=0.3, регулятор также работает в устойчивом режиме. Ошибка регулирования стремится к установившемуся значению. Устойчивость является основной оценкой динамических свойств систем автоматического управления. Устойчивость систем автоматического управления связана с характером её поведения после прекращения внешнего воздействия. Это поведение описывается свободной составляющей решения дифференциального уравнения, которое описывает систему. Если свободная составляющая рабочего параметра объекта управления после прекращения внешнего воздействия стремится к нулю, то такая система является устойчивой. Другими словами, устойчивость системы − это есть затухание ее переходных процессов. Система автоматического управления будет устойчива, если переходный процесс, вызванный любым возмущением, будет затухающим, то есть с течением времени будет стремиться к какому-то определенному значению. Для выполнения этого условия необходимо, чтобы действительная часть сопряженных корней характеристического уравнения системы была отрицательной.
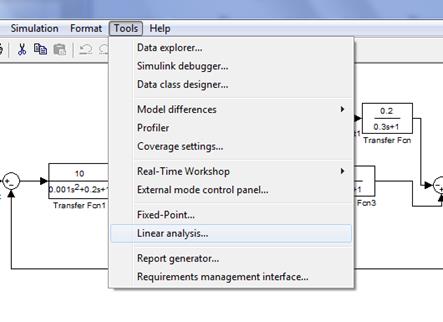
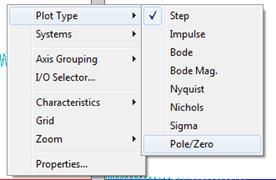
В пакете Simulink возможно автоматическое применение трех критериев устойчивости: 1) по корням характеристического уравнения системы; 2) частотные критерии устойчивости Найквиста; 3) критерий устойчивости Никольса. Для устойчивых систем необходимо и достаточно, чтобы все корни характеристического уравнения лежали слева от мнимой оси комплексной плоскости, то есть, как было сказано выше, были отрицательными. Если хотя бы один вещественный корень или пара комплексных сопряженных корней находится справа от мнимой оси, то система является неустойчивой. Если имеется нулевой корень или пара чисто мнимых корней, то система считается нейтральной (находящейся на границе устойчивости и неустойчивости). Таким образом, мнимая ось комплексной плоскости является границей устойчивости. В пакете Simulink устойчивость системы по корням характеристического уравнения определяется с использованием пакета расширения LTI Viewer путем нажатия правой кнопки на поле графика и выбора пункта контекстного меню Plot Type > Pole/Zero. Проверим нашу систему на устойчивость. Для этого сделаем следующее: 1)
2)
3)
4)
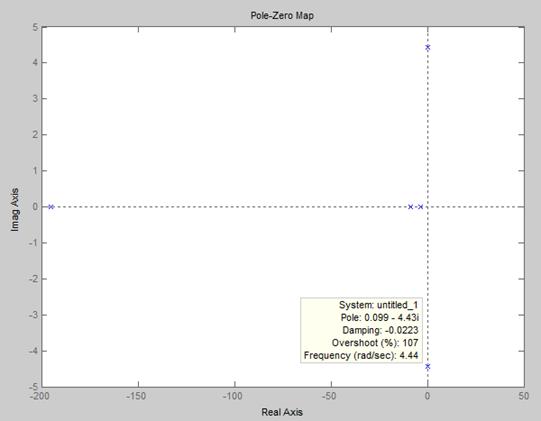
Система является устойчивой, так как имеет единственную пару сопряженных корней с отрицательной вещественной составляющей (лежат левее мнимой оси). Поменяем значения коэффициентов k2=5, k5=0.4.
Окно настройки параметров блока Gain будет иметь следующий вид
А в окне настройки параметров блоков Transfer Fcn1, Transfer Fcn2, Transfer Fcn3, Transfer Fcn4 зададим следующие параметры
Результаты функционирования такой модели представлены в графическом окне блока Scope
Исследуем данную систему на устойчивость по корням характеристического уравнения системы. Получим
Система является неустойчивой, так как имеет единственную пару сопряженных корней с положительной вещественной составляющей (лежат правее мнимой оси). В замкнутой системе автоматического регулирования с уменьшением значения коэффициенте К изменение нагрузки на валу машины начинает сказываться на угловой скорости вращения маховика. В замкнутой системе автоматического регулирования чрезмерное увеличение значения коэффициента K может привести к потере устойчивости, что недопустимо.
Заключение При эксплуатации паровых машин выявилась такая особенность их работы, как изменение скорости вращения вала при увеличении или уменьшении нагрузки со стороны обслуживаемых машиной станков, насосов и других агрегатов. Раскроем подробнее данное утверждение. Пусть, например, станок выключен, что означает резкое уменьшение нагрузки для обслуживающей его паровой машины. В результате нарушения равновесия между действующим и нагрузочными моментами скорость вала паровой машины резко возрастала, что приводило к неприятным последствиям вплоть до поломок. Необходимо было стабилизировать процесс работы паровой машины — свести на нет влияние на нее со стороны нагрузки: включен или выключен станок или иной потребитель энергии, а вал паровой машины должен был продолжать вращаться с почти постоянной скоростью. Этой цели послужил центробежный регулятор, изобретенный выдающимся английским инженером Д. Уаттом в конце XVIII века. Порой результат работы регулятора Уатта был негативным: в связке «машина — регулятор» наблюдалось явление самораскачивания, состоящее в колебаниях муфты и заслонки, а следовательно, и угловой скорости вращения вала станка с определенной частотой. Ответить на вопрос, почему в одних случаях регулятор Уатта работает нормально, устойчиво, а в других переходит в колебательное движение, т.е. неустойчиво, настоятельно требовала новая отрасль — машиностроение, развивающаяся ускоренными темпами. В устойчивой системе колебания, вызванные любым внешним воздействием, со временем затухают; в неустойчивой, напротив, возрастают. В нарушении условия устойчивости и коренилась причина самораскачивания, состоящая в колебаниях муфты и заслонки регулятора Уатта.
Список литературы
1. Каганов В.И. Радиоэлектронные системы автоматического управления. Компьютеризированный курс: Учебн. пособие для вузов.-М.: Горячая линия – Телеком, 2009.-432с. 2. Дорф Р. Современные системы управления/ Р. Дорф, Р.Бишоп. Пер. с англ. Б.И. Копылова. – М.: Лаборатория Базовых Знаний, 2002. – 832с. 3. Обеснюк В.Ф., Кулезнева Е.П. Моделирование систем. Лекции: Учебное пособие. – Челябинск: Изд-во ЮУрГУ, 2005. – 83 с. 4. Е..Э.Страшинин Основы теории автоматического управления, Часть 1. Линейныенепрерывные системы управления.: Учебное пособие / Е.Э.Страшинин. Екатеринбург: УГТУ, 2000 5. Лазарев Ю. Моделирование процессов и систем в MATLAB. – СПб: Питер, 2005. 6. Битюков, В.; Голоденко, Б. Автоматизация информационных технологий и процессов современных производств, ВГТА; 304 с; 2003
|





 ,
,




 на панели инструментов. Процесс расчета можно завершить досрочно, выбрав пункт меню Simulation/Stop или инструмент
на панели инструментов. Процесс расчета можно завершить досрочно, выбрав пункт меню Simulation/Stop или инструмент  . Расчет также можно остановить (Simulation/Pause) и затем продолжить (Simulation/Continue).
. Расчет также можно остановить (Simulation/Pause) и затем продолжить (Simulation/Continue).