| ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса - ваш вокал Игровые автоматы с быстрым выводом Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Вкуснейший "Салат из свеклы с чесноком" Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека - Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
| Усилительные устройства автоматики 12
В автоматике широко применяются специальные устройства – усилители, способные в десятки и сотни раз увеличивать мощность сигнала, поступающего с выхода датчика. Необходимость применения усилителя объясняется тем, что выходной сигнал датчика обычно очень слаб и недостаточен для управления исполнительными механизмами. Основными характеристиками усилителя являются его рабочая характеристика и коэффициент усиления. Рабочая характеристика усилителя представляет собой зависимость между выходной и входной величинами при установившемся режиме
Коэффициент усиления, например, для электрических усилителей показывает во сколько раз мощность, ток или напряжение на выходе усилителя больше мощности, тока или напряжения на его входе. Различают коэффициенты усиления по мощности Кр, по току KI и по напряжению КU, которые соответственно равны:
Мощность, потребляемая от вспомогательного источника энергии, выходная мощность и КПД определяют энергетические свойства усилителя [2, 3]. Усилители могут быть однокаскадными и многокаскадными, которые собирают из отдельных каскадов для получения необходимой выходной мощности сигнала. Быстродействие усилителей оценивается по их динамическим характеристикам (временным или частотным). Усилители магнитные, электромашинные, гидравлические и пневматические имеют меньшее быстродействие, чем электронные и полупроводниковые усилители. Например, значение постоянной времени электронного усилителя равно 10-6…10-10 с, а пневматического усилителя 1…10-1 с. В зависимости от средств передачи энергии усилители подразделяются на механические, гидравлические, пневматические, электрические, магнитные, электpoмагнитные и комбинированные. В автоматике наибольшее распространение получили рассмотренные ниже усилители, использующие в качестве внешнего источника электрическую энергию и усиливающие сигнал по напряжению или мощности либо по напряжению и мощности одновременно. При этом иногда одновременно с усилением сигнала происходит преобразование переменного тока в постоянный или наоборот. Чаще всего применяются электрические усилители, которые можно разделить на две большие подгруппы: усилители, не содержащие подвижных частей (электронные, полупроводниковые, тиратронные, магнитные), и усилители, содержащие подвижные части (электромашинные). Электронные полупроводниковые усилители. К наиболее распространенным усилителям относятся усилители на электронных лампах, полупроводниковых приборах (транзисторах) и на интегральных микросхемах. В усилителях на электронных лампах основными элементами являются трехэлектронные или более сложные электронные лампы. Бурное развитие полупроводниковой техники вызвало широкое применение усилителей на полупроводниковых приборах, которые более надежны и компактны по сравнению с электронными лампами. Для построения полупроводниковых усилителей используют полупроводниковые триоды (транзисторы). Транзисторы - это трехэлектродные полупроводниковые приборы. Они могут быть плоскостными и точечными. Широкое применение получили плоскостные транзисторы. В простейшем виде транзистор представляет собой пластину полупроводника с тремя чередующимися областями разной электропроводности, образующими два перехода. Две крайние области обладают проводимостью одного типа, средняя – проводимостью другого типа. Если в крайних областях преобладает дырочная проводимость, а в средней – электронная, то такой прибор называют транзистором р – n – р (рис. 16, а) типа. У транзистора n – p – n типа, наоборот, по краям расположены области с электронной проводимостью, а между ними – область с дырочной проводимостью.
Рис. 16. Схема транзистора (а) и усилителя на транзисторе (б): К – коллектор; Б – база; Э – эмиттер.
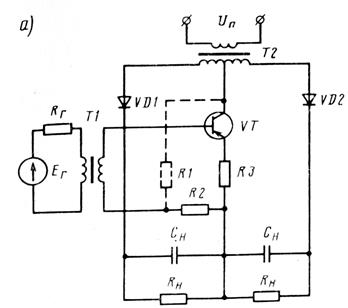
Простейший усилитель на транзисторе VT (рис. 16, б) работает следующим образом. Коллектор и база транзистора типа р – n – р должны иметь отрицательный потенциал по отношению к эмиттеру. Источник тока G, положительный полюс которого соединен с эмиттером, создает в нем избыточные положительные заряды – «дырки», которые через эмиттерный переход устремляются в базу. Небольшая часть «дырок» рекомбинирует (воссоединяется) с электронами в объеме базы, а большая часть проходит через коллекторный переход и коллектор к отрицательному полюсу источника питания. Ток базы всегда в десятки, иногда в сотни раз меньше тока коллектора. При этом изменение тока базы вызывает изменение тока коллектора на значительно большую величину. В данном конкретном случае ток базы транзистора можно изменять подбором резисторов Rб. Поэтому если на выводы базы и эмиттера подать электрический сигнал в виде переменного напряжения, то переменная составляющая тока коллектора будет во много раз больше переменной составляющей тока базы. Этим и определяется использование транзистора для усиления сигналов и генерирования электрических колебаний. Сигнал, который надо усилить (входной), подают в цепь база-эмиттер через конденсатор, который пропускает только переменную составляющую входного сигнала. Усиленный сигнал (выходной) снимают с нагрузочного резистора Rк, включенного между коллектором и источником питания. Если полярность напряжения между базой и эмиттером изменить на обратную, то эмиттерный переход окажется обратно смещенным и через него пойдет обратный ток, величина которого мало зависит от напряжения между этими электродами транзистора. В результате количество носителей тока, поступающих из эмиттера в базу, будет настолько мало, что ток коллектора почти полностью прекратится – транзистор окажется закрытым. Наиболее часто транзистор включают по схеме с общим эмиттером (ОЭ) (см. рис. 16, б). В этом случае входной сигнал вводится в цепь база-эмиттер, а усиленный выходной сигнал получается на нагрузке Rк . При таком включении транзистора эмиттер является общим электродом, так как через него текут токи входного и выходного сигналов. Усилители на полупроводниковых приборах, так же как и усилители на электронных лампах, собирают из отдельных каскадов для получения достаточного усиления сигнала (многокаскадные усилители). Они легки, компактны, экономичны, сразу после включения готовы к работе и поэтому находят широкое применение в малогабаритной аппаратуре и устройствах автоматики. В автоматических электронных потенциометрах, самобалансирующих мостах и подобных им приборах, в основу которых положена непрерывная автоматическая балансировка измерительной схемы, применяются транзисторные фазочувствительные усилители (усилители – демодуляторы). Одним из важнейших свойств фазочувствительных усилителей является реагирование на изменение фазы входного сигнала, т. е. получение на выходе сигнала обратной полярности. Таким образом, схемы усилителей данного типа реверсивны. Преобразование входного сигнала сопровождается одновременно усилением его по мощности. Фазочувствительные усилители используют в таких схемах автоматики, где необходимо осуществлять движение исполнительного механизма в направлении, зависящем от фазы управляющего сигнала. Схемы фазочувствительных транзисторных усилителей по существу представляют собой управляемые усилители – выпрямители или усилители среднего значения тока, в которых транзистор выполняет роль вентиля с управляемым сопротивлением. Нагрузкой фазочувствительного усилителя наиболее часто является обмотка управляемого реверсивного электродвигателя или электромагнитного механизма. На рис. 17, а, приведена схема однополупериодного фазочувствительного каскада, предназначенного для работы на дифференцированную нагрузку. В схеме использованы один транзистор и два диода. Переменное напряжение питания UП подводится к схеме через трансформатор Т2, вторичная обмотка которого имеет вывод средней точки, соединенной с коллектором транзистора. Напряжение сигнала подается со вторичной обмотки трансформатора Т1. При подаче напряжений питания и сигнала (совпадающих по фазе) в первый полупериод в левом контуре схемы создается управляемый коллекторный ток, а в правом контуре – обратный ток диода VD2. Во второй полупериод, когда во входной цепи протекает незначительный обратный ток эмиттерного перехода, в левом контуре схемы действует обратный ток диода VD1, а в правом контуре – ток, приблизительно равный начальному коллекторному току. Следовательно, в течение полупериода в одном из резисторов нагрузки протекает ток, зависящий от напряжения сигнала. При изменении фазы напряжения сигнала на 180° управляемый ток протекает в другом резисторе нагрузки. В этом заключается одно из важнейших свойств усилителя данного типа – реагировать на фазу управляющего сигнала. Более предпочтительными являются схемы транзисторных фазочувствительных усилителей двуxполупериодного выпрямления, которые обеспечивают большое усиление по мощности при малых пульсациях тока в нагрузке. Работа двухполупериодной схемы фазочувствительного каскада (рис. 17, б) не отличатся от работы однополупериодной схемы. Для повышения температурной стабильности характеристик и входного сопротивления каскада в схему может быть введена последовательная отрицательная связь путем включения резисторов в эмиттерные цепи транзистора.
Рис. 17. Схемы каскада фазочувствительного усилителя: а – однополупериодного; б – двухполупериодного
Магнитные усилители. Усилители этого вида относятся к ферромагнитным устройствам и предназначены для увеличения мощности подводимых электрических сигналов за счет энергии местного источника. С помощью магнитных усилителей можно осуществлять суммирование, дифференцирование, интегрирование и сравнение сигналов, стабилизацию напряжения, тока и т. д. В усилителях следящего привода их применяют в основном в оконечных и предоконечных каскадах мощного усиления. Магнитные усилители обладают высоким коэффициентом полезного действия и значительными коэффициентами усиления по мощности и току. Они надежно работают как при нормальных условиях, так и при повышенной влажности, при высокой и низкой температурах, при тряске, вибрации, ударных ускорениях. Неотъемлемой частью любого магнитного усилителя является ферромагнитный сердечник, кривая намагничивания которого имеет нелинейный характер. Магнитная проницаемость ферромагнитных материалов резко изменяется при подмагничивании их постоянным током. На этом и основан принцип действия магнитных усилителей. Схема магнитного усилителя (МУ) показана на рис. 18, а. На двух магнитных сердечниках А и В нанесены две обмотки переменного тока W1 и W3, соединенные последовательно. Обмотка подмагничивания W2 охватывает стержни обоих сердечников и питается от источников постоянного тока. Число витков и их направление в обмотках W1 и W3 выбирают таким образом, чтобы сумма их магнитных потоков Ф1 и Ф2 была равна нулю и в обмотке W2 не индуктировалась электродвижущая сила. При сравнительно небольшом увеличении напряжения постоянного тока UВХ магнитная проницаемость сердечника резко снижается и, следовательно, понижается индуктивное сопротивление обмотки переменного тока. Увеличивается ток, проходящий через нагрузку RН, включенную в цепь переменного тока и, следовательно, увеличивается напряжение UВЫХ, снимаемое с нагрузки. Зависимость величины выходного напряжения UВЫХ от входного напряжения UВХ приведена на рис 18, б. При отсутствии подмагничивания выxодное напряжение мало. При подмагничивании выходное напряжение сильно увеличивается.
Рис. 18. Схема (а) и характеристика (б) магнитного усилителя
Коэффициент усиления магнитного усилителя по мощности определяют из следующего выражения
где РВЫХ – мощность в нагрузке при подмагничивании усилителя, Вт; РВХ – мощность, выделяющаяся в сопротивлении нaгpузки при Р0 = 0, Вт; Р0 – мощность подмагничивания (управления), Вт. Коэффициент усиления магнитного усилителя по мощности зависит от материала; так, при трансформаторной стали он находится в пределах 50…200, а при использовании пермаллоя возрастает до 1000. С повышением частоты тока коэффициент усиления магнитного усилителя значительно возрастает, и при частоте 500 Гц он доходит для магнитного усилителя на пермаллое до 2000. При применении положительной обратной связи коэффициент усиления МУ может быть значительно увеличен (до 3000…5000 и выше). В схеме магнитного усилителя с положитeльной обратной связью (рис. 19, а) переменный ток на выходе выпрямляется полупроводниковым выпрямителем В2 и поступает на обмотку W2, которая создает дополнительное подмагничивание, усиливающее поле, созданное током в управляющей обмотке.
Рис. 19. Схема (а) и характеристика (б) магнитного усилителя с обратной связью
Характеристика усилителя с обратной связью (рис. 19, б) несимметрична: в правой части крутизна ее больше (положительная обратная связь), а в левой части – меньше (отрицательная обратная связь). Изменением обратной связи магнитный усилитель превращается в бесконтактное реле. Вместе с тем для ряда областей техники необходимы усилительные элементы с такой характеристикой, при которой переменная полярность управляющего сигнала вызывает изменение полярности выходного напряжения или изменение фазы выходного напряжения на 180°. Такой характеристикой обладает дифференциальный магнитный усилитель. Он может быть выполнен путем соответствующего соединения двух простых магнитных усилителей. Магнитные усилители обладают следующими положительными качествами: отсутствием электрической связи между цепью нагрузки и цепями управления, а также возможностью суммирования на обмотках управления нескольких входных сигналов, не связанных электрически; простотой и надежностью конструкции; легкостью эксплуатации; постоянной готовностью к действию; отсутствием вращающихся частей и подвижных контактов; возможностью значительных перегрузок; высоким коэффициентом полезного действия. Эти достоинства объясняют широкое распространение магнитных усилителей. Они обеспечивают плавное регулирование частоты вращения двигателей постоянного тока и строгое соблюдение необходимого режима работы для основных регулируемых механизмов технологических процессов (подвесных магнитов). Кроме того, использование магнитных усилителей дало возможность заменить контактные системы двуxпозиционного автоматического регулирования более прогрессивными и работоспособными бесконтактными системами автоматического регулирования. В то же время МУ неприменимы при высоких частотах и обладают большой инерционностью, что является их недостатком, поэтому МУ применяют в тех системах автоматики, где не требуется быстродействия. Электромaшинные усилители. Электромашинный усилитель (ЭМУ) представляет собой электрическую машину постоянного тока, в которой одна из двух пар щеток замкнута накоротко (рис. 20). ЭМУ могут иметь несколько или одну обмотку управления, которые с помощью тока возбуждения небольшой силы позволяют управлять значительной выходной мощностью.
Рис. 20. Электромашинный усилитель
При вращающемся ЭМУ от подачи возбуждения в управляющую обмотку (УО), в ней возникает магнитный поток возбуждения ФВ, который вызывает в якоре ЭМУ э.д.с. Так как щетки поперечной оси 2 – 2 замкнуты накоротко, то под влиянием этой небольшой э.д.с. по обмотке якоря пройдет значительный ток I2, который создаст мощный поперечный поток Ф2. Под действием Ф2 в якоре ЭМУ возникает большая продольная э.д.с., снимаемая с продольных щеток 1 – 1. Если ЭМУ теперь замкнуть на какую-либо нагрузку, то по обмотке якоря пройдет ток I1, который создаст магнитный поток реакции якоря Фя, размагничивающий ЭМУ. Чтобы устранить это влияние потока Фя, на полосах ЭМУ наносится компенсационная обмотка КО, включенная последовательно с якорем в цепь нагрузки, магнитный поток которой Фк будет компенсировать влияние магнитного потока Фя. Для точной компенсации потока Фя служит шунтирующее сопротивление rш. Коэффициент усиления по мощности ЭМУ составляет 5000…10000. Наряду с неоспоримыми достоинствами (большой коэффициент усиления по мощности, сравнительно малые габаритные размеры) ЭМУ обладают существенными недостатками (склонность к самовозбуждению, невысокая надежность и недолговечность), что объясняет возможность их применения лишь в малоответственных системах автоматического регулирования. Тиратронные усилители применяются в автоматических системах регулирования. Технические характеристики этих усилителей во многом совпадают с техническими характеристиками электронных усилителей. Основным преимуществом тиратронных усилителей по сравнению с электронными усилителями является большая выходная мощность, которая получается за счет большего анодного тока. Анодный ток для современных тиратронов колеблется от нескольких сотен миллиампер до нескольких сотен ампер. Увеличение анодного тока тиратрона возможно из-за наличия ионизированного газа в пространстве между анодом и катодом. К недостаткам тиратронных усилителей относятся: большой разброс параметров и небольшая чувствительность, необходимость предварительного прогрева катода тиратрона до подачи питания на анод (время прогрева катода может составлять от 10 с до 40 мин). Для построения тиратронных усилителей применяются паро- или газонаполненные трех- или четырех электродные лампы. В системах автоматики применяются комбинированные усилители, которые могут состоять из двух-трех или трех-четырех типов усилителей. Такие комбинации дают возможность использовать достоинства каждого типа усилителя. При выборе комбинированного усилителя учитываются следующие основные показатели: срок службы, надежность в работе, мгновенная готовность к работе, масса и габариты, выходная мощность для управления исполнительным двигателем, чувствительность и коэффициент усиления, а также потребляемая усилителем мощность. Достаточное распространение получили такие комбинированные усилительные системы, как электронно-тиратронные, электронно-магнитные, полупроводниково-магнитные [1, 5]. Исполнительные устройства Исполнительные устройства предназначены для непосредственного воздействия на управляемый объект или его органы управления. Исполнительные устройства, применяемые в системах автоматики, очень разнообразны. По физической природе они делятся на электрические, гидравлические, пневматические, механические и комбинированные. По конструкции различают электродвигательные, электронные, электромагнитные, поршневые, мембранные и комбинированные исполнительные устройства. Управление исполнительными устройствами осуществляется, как правило, через усилители мощности. Помимо того, непосредственно к исполнительному устройству может подводиться энергия от дополнительного источника. Исполнительные устройства должны удовлетворять следующим требованиям: - их мощность должна превосходить мощность, необходимую для приведения в движение объекта управления или его органов во всех режимах работы; - статические характеристики исполнительных устройств должны быть, по возможности, линейными и иметь минимальную зону нечувствительности, т.е. такую зону, в пределах которой изменения управляющего сигнала не вызывают перемещение управляемого органа; - достаточное быстродействие; - простота и экономичность регулирования выходной величины; - малая потребляемая мощность. В качестве исполнительных устройств в системах автоматики в основном применяются электромагнитные реле, электромагниты, электродвигатели постоянного тока, двухфазные электродвигатели переменного тока, электромагнитные муфты, мембранные и поршневые, гидравлические и пневматические двигатели. Широкое распространение получили электрические исполнительные устройства, т.е. устройства, преобразующие энергию электрического тока в механическую энергию с целью воздействия на объект управления. Электрические исполнительные устройства делятся на электромагнитные и электродвигательные. К электромагнитным устройствам относятся реле, контакторы, электромагниты, электромагнитные вентили и клапаны, электромагнитные муфты, а к электродвигательным - двигатели постоянного и переменного тока и шаговые (импульсные). Электромагнитные исполнительные устройства, основным элементом которых является электромагнитный привод, как правило, используются для поступательного перемещения органов управления, а электрические двигатели – для поворотного [4]. Электрические исполнительные устройства. Электродвигатели. Наибольшее распространение получили двигатели постоянного тока с независимым возбуждением и асинхронные двигатели (переменного тока) с короткозамкнутым ротором, которые по своим эксплуатационным качествам превосходят двигатели постоянного тока. Тем не менее двигатели постоянного тока, обладая высокими пускорегулирующими свойствами, находят широкое применение в специальных системах автоматики.
Рис. 21. Схемы управления двигателем постоянного тока с независимым возбуждением Рассмотрим две характерные схемы управления исполнительными двигателями постоянного тока с независимым возбуждением. В первой схеме (рис. 21, а)обмотка возбуждения подключена к источнику питания с постоянным напряжением UВ, а якорь к усилителю У. Управление двигателем достигается изменением напряжения UУ цепи якоря. Во второй схеме (рис. 21, б), наоборот, обмотка возбуждения подключена к усилителю У, а якорь к источнику постоянного напряжения U. Для устройств автоматики используют двигатели постоянного тока с независимым возбуждением серии СЛ (мощностью от 7,5 до 230 Вт, напряжением 110 В; частота вращения от 850 до 5200 об/мин). Из маломощных асинхронных двигателей переменного тока используют двухфазные, а из более мощных – трехфазные. Двухфазные асинхронные исполнительные двигатели выполняются с короткозамкнутым ротором и с ротором в виде тонкостенного полого цилиндра. Последние отличаются малым моментом инерции и применяются в быстродействующих исполнительных устройствах. Одна обмотка статора двигателя (рис. 22, а) подключена к сети переменного тока с неизменным напряжением UВ и называется обмоткой возбуждения (ОВ). Другая обмотка – обмотка управления (ОУ) – подключена к усилителю УВ регулируемым напряжением Uy той же частоты, что и напряжение питания.
Рис. 22. Схема (а) и характеристика (б) двухфазного асинхронного двигателя
Для получения двухфазного вращающегося поля необходимо при пространственном сдвиге обмоток на 90° обеспечить сдвиг магнитодвижущих сил обмоток по фазе на 90°. С этой целью в обмотки возбуждения ОВ включают соответствующую емкость С. Чтобы изменить направление вращения двигателя, достаточно изменить на 180° фазу напряжения у любой обмотки статора. Плавное управление частотой вращения двигателя от нуля до максимума возможно благодаря изготовлению ротора с большим активным сопротивлением. Кроме того, при таком роторе исключается возможность вращения двигателя в однофазном режиме при снятом сигнале с управляющей обмотки. Это очень важно для исполнительных двигателей, так как в противном случае может произойти потеря управления. Примерные механические характеристики двухфазного исполнительного двигателя при разных напряжениях в обмотках управления показаны на рис 22, б. Асинхронные двигатели выпускают с короткозамкнутым ротором – серия АСМ, мощность 0,67…4,6 Вт и с полым ротором – серия АДП для частот 50, 330, 427 и 500 Гц, мощностью от 3,7 до 6,2 Вт (для частоты 50 Гц изготавливают двигатели АДГ двух типов – мощностью 9,5 и 19 Вт). Реже в качестве исполнительных устройств применяют трехфазные асинхронные двигатели. Управление ими осуществляется изменением напряжения питания или частоты. Наиболее распространены малые трехфазные асинхронные двигатели с плавными характеристиками серии АОЛ мощностью от 50 до 1000 Вт, напряжением 127, 220 и 380 В, частотой 50 Гц. Шаговые электродвигатели используются в тех автоматических устройствах, где управляющий сигнал задается в цифровой форме или в виде последовательных импульсов. Автоматизированный привод дискретного действия с шаговыми двигателями достаточно прост, надежен и имеет малые габариты. Шаговые двигатели применяют в различного рода счетчиках, затворах, лентопротяжных механизмах. Электромагниты. Электромагниты предназначены для выполнения быстрых перемещений рабочего органа на небольшие расстояния и в основном для управления гидравлическими или пневматическими вентилями, кранами, задвижками, золотниками. В зависимости от величины хода якоря электромагниты могут быть длинноходовыми и короткоходовыми. Один из видов исполнительного устройства – простой электромагнитный вентиль (соленоидное исполнительное устройство) – приводит в действие клапан, открывающий и закрывающий доступ рабочей жидкости или сжатого воздуха в привод машины (рис. 23, а). При прохождении по катушке 1 электрического тока стальной якорь 2 втягивается внутрь соленоида и открывает клапан 3.
Рис. 23. Электромагнитные исполнительные устройства: а – вентиль; б – муфта
На принципе электромагнитного притяжения основаны устройства и действие электромагнитных муфт (рис. 23, б), получивших широкое применение в автоматизированных станках и других машинах, где при их помощи производятся различные переключения в кинематических цепях без прерывания движения. На ведущем валу 4 жестко закреплен корпус 5 электромагнита. Якорь 2 расположен на ведомом валу 9. Между корпусом 5 и якорем 2 помещен фрикционный диск 6. В корпусе 5 находится катушка 7, которая питается постоянным током через контактные кольца и щетки. При прохождении через обмотку катушки электрического тока в корпусе возникает магнитный поток, пронизывающий фрикционный диск и замыкающийся через якорь. Якорь притягивается к корпусу, и движение ведущего вала 4 передается ведомому валу 9. При прекращении подачи тока в катушке пружина 8 отталкивает якорь 2 от корпуса 5 и движение ведомого вала прекращается. В случае когда необходимо реверсивное вращение ведомого вала при неизменном вращении ведущего вала, применяют реверсивные сдвоенные муфты. Реле. Одним из наиболее pacпростpaненных элементов автоматики является реле - устройство, реагирующее на изменение тех или иных факторов замыканием или размыканием своих контактов под воздействием электрического тока, световой энергии, давления жидкости или газов, уровня жидкости, температуры и т. п. Статическая характеристика реле (рис. 24) выражает функциональную зависимость параметра выходной величины у от входной x и имеет дискретный характер. Только при достижении входной величиной x значения xср реле скачкообразно изменяет значение параметра у от у1 до у2 Дальнейшее увеличение x уже не приводит к изменению параметра у. При уменьшении x до xотп снова скачкообразно изменяется значение параметра у от у2 до у1. Работа реле характеризуется в основном параметрами срабатывания и отпускания, коэффициентом возврата и мощностью управления.
Рис. 24. Статическая характеристика реле
Параметр срабатывания реле – минимальное значение физической величины (тока, напряжения, давления и др.), при которой происходит срабатывание реле, т. е. изменение его состояния. На характеристике (см. рис. 24) параметр срабатывания реле соответствует xср и скачкообразному изменению выходной величины от у1 до у2. Параметр отпускания реле – максимальное значение физической величины (тока, напряжения, давления, температуры и др.), при котором реле возвращается в первоначальное состояние (на характеристике он соответствует xотп и скачкообразному изменению выходной величины от у2 до у1; обычно xср Коэффициент возврата реле – отношение параметров отпускания и срабатывания
Чем больше коэффициент возврата, тем выше качество реле. У наиболее часто применяемых в системах автоматики электромагнитных реле постоянного тока коэффициент возврата КВ = 0,1…0,99. Мощность управления – наибольшая величина мощности управляемой цепи, допускающая надежную работу реле. Эта мощность зависит от общей конструкции реле (контактов управления). По принципу действия реле подразделяют на электромеханические (электромагнитные, магнитоэлектрические, электродинамические и индукционные), электронные, тепловые, механические и ряд других. Электромагнитные реле получили наибольшее распространение в системах электроавтоматики и служат в основном для коммутации электрических цепей. Действие реле (рис. 25) заключается в притяжении стального якоря 2 к сердечнику 3 электромагнита, по обмотке 4 которого пропускается управляющий ток. При отсутствии тока якорь оттягивается от сердечника возвратной пружиной 1. Якорь замыкает или размыкает контакты 5. Электромагнитные реле по роду используемого тока подразделяются на реле постоянного и переменного тока.
Рис. 25. Схема электромагнитного реле
Рис. 26. Схема электромагнитного реле переменного тока
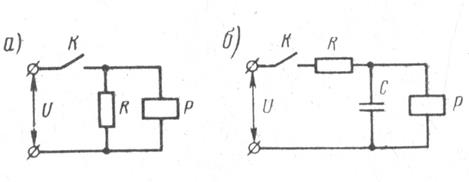
Реле переменного тoка (рис. 26) состоит из тех же деталей, что и реле постоянного тока. Отличие заключается в том, что сердечник 1, ярмо 2 и якорь 3 этого реле изготавливаются из листовой электротехнической стали с целью уменьшения потерь на гистерезис и вихревые токи. Сила притяжения якоря реле переменного тока принимает нулевые значения в момент прохождения магнитного потока, изменяющегося по синусоидальному закону, через ноль. В эти моменты возвратная пружина может оттянуть назад малоинерционный якорь и вызвать его вибрацию и даже искрение контактов реле. Для устранения этого нежелательного явления реле переменногo тока изготавливают с короткозамкнутым витком 4, охватывающим часть сердечника (см. рис. 26). Когда основной магнитный поток Ф1Ф2, создаваемый обмоткой реле, проходит через нулевое значение, ток в короткозамкнутом витке создает в сердечнике поток Ф, удерживающий якорь в притянутом положении. Реле имеют большое количество различных контактов и контактных пар на замыкание и размыкание. Реле постоянного тока являются наиболее распространенным видом реле. Они подразделяются на нейтральные и поляризованые. Поляризованное реле в отличие от нейтрального работает в зависимости от полярности приложенного напряжения. Поляризованное реле отличается от обычного электромагнитного реле дополнительной установкой постоянного магнита и зависимостью направления перемещения якоря от напряжения намагничивающего тока. Высокая чувствительность, малое время срабатывания и возможность реагирования на полярность управляемого сигнала делают реле незаменимым в автоматике. Поляризованные реле могут быть двухпозиционными и трехпозиционными с тремя устойчивыми положениями: средним и двумя крайними. Тепловое реле срабатывает в результате изменения температуры. Основной частью большинства тепловых реле является биметаллическая пластина, состоящая из двух спаянных пластинок из различных металлов, имеющих разные коэффициенты температурного расширения. При пропускании тока по обмотке биметаллическая пластина, нагреваясь, изгибается и замыкает рабочие контакты. Тепловые реле находят широкое применение в различных схемах защиты, например в схеме защиты электродвигателей от перегрузки. В схемах автоматики применяют тепловые реле типов ТРВ –113, ВПУ, РВТ – 150, РТ и другие. Реле времени – это специальное устройство, предназначенное для получения заданной выдержки времени при включении или выключении электрических цепей. Увеличение времени срабатывания или отпускания реле достигается магнитным, электрическим или механическим способом. Магнитный способ замедления действия реле предусматривает увеличение времени изменения магнитного потока. В этом случае на магнитопровод реле надевают медный короткозамкнутый виток, в котором при подаче напряжения на обмотку реле возникает электрический ток, создающий размагничивающий магнитный поток. Промежуток времени от момента включения обмотки реле до момента его срабатывания увеличивается. Отечественной промышленностью выпускаются электромагнитные реле серии ЭРЭ – 100 с выдержкой времени от 0,25 до 16 с и более. Электрические методы замедления срабатывания и отпускания реле сводятся к замедлению нарастания и спадания тока введением в схему дополнительных сопротивлений, индуктивностей, емкостей. На рис. 27 приведены схемы замедления срабатывания электромагнитных реле постоянного тока. В одном случае (рис. 27, а) параллельно обмотке реле включено сопротивление R, по которому после размыкания ключа К протекает ток, создающий магнитный поток, увеличивающий время отпускания реле. В другом случае (рис. 27, б) выдержка времени достигается путем шунтирования катушки реле емкостью С. В этой схеме увеличивается время срабатывания и опускания.
Рис. 27. Схемы включения электромагнитного реле с увеличением времени срабатывания
Механические методы позволяют осуществить выдержку времени с применением масляных или воздушных демпферов, часовых механизмов, например, в реле РВП – 1М, PBП – 2, ЭВ – 100. Большая выдержка времени обеспечивается моторными реле времени. Контакты этих реле приводятся в действие маломощными электродвигателями. Промышленностью выпускаются моторные реле времени ВС (ВС – 2, ВС – 3, ВС – 7, ВC–10), осуществляющие выдержку времени в пределах от 6 с до 24 ч. К моторным реле можно отнести командный электропневматический прибор КЭП – 12У, коммутирующий по устанавливаемой программе 12 электрических и пневматических цепей. Командный электропневматический прибор получил широкое применение при автоматизации бетоносмесительных узлов на заводах железобетонных конструкций. Контактором называют аппарат для дистанционного включения и отключения силовых электрических цепей. По принципу действия электромагнитный контактор аналогичен электромагнитному реле. Как правило, контактор состоит из контактов, осуществляющих замыкание и размыкание силовой цепи тока, электромагнита и дугогасительного устройства. Кроме главных контактов, зачастую устанавливают один или несколько блок-контактов, предназначенных для коммутации цепей управления, а также для связи с другими аппаратами сигнализации и электронной блокировки. Контакторы имеют как замыкающие, так и размыкающие контакты. Отечественной промышленностью выпускаются серийно контакторы типов КТ и КТВ (переменного тока 75, 150, 300 и 600 А), а также серии КП – 500 (постоянного тока 100, 150, 300 и 600 А). Магнитный пускатель представляет собой электромагнитный контактор переменного тока, смонтированный в стальном корпусе вместе с тепловым или другого типа реле защиты от перегрузки или коротких замыканий. В системах автоматического управления и регулирования магнитные пускатели могут быть применены для включения привода различных исполнительных механизмов, а также для дистанционного управления асинхронными двигателями малой и средней мощности. Магнитные пускатели выпускаются нескольких серий. Основные из них ПА, П – 6 и ПМУ. Все большее применение в системах автоматического управления находят герметизированные магнитоуправляемые контакты (МУК) – герконы, которые размещаются внутри обмотки и по существу представляют собой безъякорное реле. Контакты в виде двух пластин из феррамагнитного материала (пермаллой и др.) помещаются внутри стеклянной ампулы, наполненной аргоном (иногда водородом, азотом). При подаче входного сигнала в обмотку, внутри которой расположен магнитоуправляемый контакт (число их иногда достигает десятка), происходит намагничивание ферромагнитных пластин, возникают усилия притяжения и концы пластин образуют контакт, коммутирующий выходную цепь нагрузки. При отключении обмотки от источника сигнала пластины под действием упругих сил возвращаются в исходное положение. Малые расстояние между контактами и инерционность подвижных частей обеспечивают высокое быстродействие реле – время срабатывания их достигает 10 мкс. Магнитоуправляемые контакты часто используются во всякого рода конечных выключателях, счетчиках импульсов и т.д. Электронное реле состоит из электронного усилителя и электромагнитного реле, катушка которого включена в выходную цепь усилителя. Благодаря усилителю мощность срабатывания электронного реле достигает 10-8…10-10 Вт. Основным достоинством электронных реле является то, что они реагируют на управляющие сигналы ничтожной мощности. Для широкого внедрения автоматического управления и вычислительных машин необходимы переключающие устройства релейного действия, обладающие свойствами электромагнитных реле, но не имеющие механических контактов, так как последние в сложных устройствах не обеспечивают быстродействия и надежности в рабате. Таким переключающим устройством является бесконтактное электронное реле, отличающееся двумя состояниями равновесия. Каждому из этих состояний соответствуют устойчивые значения токов в цепях схемы. Подачей небольших управляющих напряжений можно заставить схему резко, скачком, перейти из одного равновесного состояния в другое. Бесконтактные электронные реле практически безынерционны (время срабатывания их составляет 0,5…10 мкс). Принципиальная схема электронного реле изображена на рис. 28, а. Реле Р1 выключено, если нет сигнала на входе, т. е. транзистор VТ1 закрыт и в коллекторной цепи нет тока. При подаче напряжения UВХ отрицательной полярности возникает ток в цепи: +, эмиттер – коллектор транзистора VТ1, обмотка реле Р1, – Ек . Соответственно срабатывает реле Р1, контакты 1–2 замыкаются. После снятия входного сигнала (напряжения) транзистор закрывается и реле Р1 выключается. Чтобы не было пробоя транзистора, параллельно обмотке реле ставится диод VD1. Диод открывается под действием э. д. с. самоиндукции, возникающей в обмотке реле Р1, при закрытии транзистора и шунтирует обмотку реле.
Рис. 28. Схемы обычного электронного реле (а) и фотореле (б)
Фотореле называется устройство, скачкообразно переключающее электрическую цепь при изменении освещенности. В качестве элементов, реагирующих на освещенность, в фотореле используются фотоэлементы (фотодиод, фототранзистор или фоторезистор). Принципиальная схема одного из фотореле изображена на рис. 28, б. Если фотодиод VD1 не освещен, то транзистор VТ1 закрыт, так как внутреннее сопротивление VD1 велико, и током базы можно пренебречь. Реле Р1 выключено. При освещении фотодиода его внутреннее сопротивление резко уменьшается и возникает ток в цепи: + Ек, эмиттер – база транзистора, фотодиод VD1, – Ек .Транзистор открывается, реле Р1 срабатывает. Диод VD2 предохраняет транзистор от пробоя. Бесконтактные электронные реле широко применяют в системах автоматического контроля и регулирования. Электромагнитные исполнительные элементы служат для выполнения простых операций управления (включать – выключать, открывать – закрывать). Более сложные функции исполнительного блока выполняют электрическими, гидравлическими и пневматическими двигателями. Гидравлические исполнительные устройства. Устройствами с гидравлическим пpинципом действия являются прежде всего гидравлические двигатели с поступательным или вращательным движением. К первому виду относятся двигатели поршневые и мембранные, а ко второму - ротационные (лопастные и поршневые). Чаще других в качестве исполнительных механизмов используются поршневые гидродвигатели поступательного движения. Основной частью такого двигателя служит гидроцилиндр с поршнем, закрепленным на штоке, который в свою очередь жестко соединяется с рабочим органом машины. Для получения вращательного движения в гидравлических системах применяют гидродвигатели с осевым расположением поршней мощностью 0,6; 1,2; 2,5; 5 и 10 кВт. Достоинство гидропривода – высокое давление рабочей жидкости при сравнительно малых габаритных размерах, что позволяет получить на выходе большую мощность и осуществить плавное бесступенчатое регулирование скорости движения. В настоящее время строительные машины, в большинстве своем, оборудуются гидроприводом. Пневматические исполнительные устройства. Эти устройства (рис. 29), в основном поршневые и мембранные, по своей конструкции аналогичны гидравлическим и применяются для приведения в действие дроссельных клапанов, зажимных приспособлений, тормозных колодок и т. п. Поршневые устройства, которые наиболее часто применяются в транспортных системах и манипулятарах, имеют стандартные диаметры от 75 до 300 мм. У мембранныx устройств диаметры от 175 до 230 мм.
Рис. 29. Пневматические исполнительные механизмы: а) поршневой двустороннего действия; б) мембранный; I и II – полости цилиндра; 1 – штуцер; 2 – канал для подачи воздуха; 3 – цилиндр; 4 – шток; 5 – поршень; 6 – отверстие для подачи воздуха; 7 – резиновая мембрана; 8 – крышки; 9 – диск; 10 – пружина; 11 – втулка; 12 – гайка; 13 – шток привода; 14 – шкала положения регулирующего органа
Пневматические устройства дешевле гидравлических, более просты в изготовлении и эксплуатации. Они не требуют высокого качества уплотнения, не реагируют на изменение температуры и имеют более простые пусковые приспособления. Однако при больших рабочих усилиях пневматические устройства должны иметь значительные габаритные размеры. Кроме того, такие устройства не могут обеспечить высокой точности перемещений и плавности подачи. Гидро– и пневмоавтоматикa и элементы их управлении находят широкое применение при автоматизации технологических процессов бетоносмесительных узлов, арматурных работ на заводах железобетонных конструкций, а также в системах автоматического управления путевыми и строительными машинами [1].
4. Лабораторные упражнения и контроль усвоения материала
В процессе изложения преподавателем общей части темы студенты заполняют лабораторную тетрадь, расставляя номера позиций на конструктивных схемах и отвечая на поставленные вопросы. При этом может быть использован материал, представленный в данных методических указаниях и приведенных ниже библиографических источниках. Контроль усвоения материала проводится в ходе защиты лабораторной работы.
Библиографический список
1. Автоматизация и механизация работ на транспортном строительстве / Под ред. К.С. Исаева. – М.: Транспорт, 1989. – 264 с. 2. Добронравов С.С., Дронов В.Г. Строительные машины и основы автоматизации. – М.: Высш. шк., 2001. – 575 с. 3. Доценко А.И. Строительные машины и основы автоматизации. – М.: Высш. шк., 1995. – 400 с. 4. Призмазонов А.М. Автоматизация и роботизация технологических процессов в строительстве: Учебное пособие. – М.: МИИТ, 2001.– 61 с. 5. Технология железнодорожного строительства / Э.С. Спиридонов, А.М. Призмазонов, А.Ф. Акуратов, Т.В. Шепитько; Под ред. А.Н. Призмазонова, Э.С. Спиридонова. – М.: Желдориздат, 2002. – 631 с.
12 |



 . (12)
. (12) ; (13)
; (13) ; (14)
; (14) . (15)
. (15)


 , (16)
, (16)





 xотп).
xотп). . (17)
. (17)