| ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса - ваш вокал Игровые автоматы с быстрым выводом Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Вкуснейший "Салат из свеклы с чесноком" Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека - Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
| Принципы работы сканирующих зондовых микроскопов
В сканирующих зондовых микроскопах исследование микрорельефа поверхности и ее локальных свойств проводится с помощью специальным образом приготовленных зондов в виде игл. Рабочая часть таких зондов (острие) имеет размеры порядка десяти нанометров. Характерное расстояние между зондом и поверхностью образцов в зондовых микроскопах по порядку величин составляет 0,1 – 10 нм. В основе работы зондовых микроскопов лежат различные типы взаимодействия зонда с поверхностью. Так, работа туннельного микроскопа основана на явлении протекания туннельного тока между металлической иглой и проводящим образцом; различные типы силового взаимодействия лежат в основе работы атомно-силового, магнитно-силового и электросилового микроскопов. Рассмотрим общие черты, присущие различным зондовым микроскопам. Пусть взаимодействие зонда с поверхностью характеризуется некоторым параметром Р. Если существует достаточно резкая и взаимно однозначная зависимость параметра Р от расстояния зонд – образец Р = Р(z), то данный параметр может быть использован для организации системы обратной связи (ОС), контролирующей расстояние между зондом и образцом. На рис. 1 схематично показан общий принцип организации обратной связи сканирующего зондового микроскопа.
Система обратной связи поддерживает значение параметра Р постоянным, равным величине Ро, задаваемой оператором. Если расстояние зонд – поверхность изменяется (например, увеличивается), то происходит изменение (увеличение) параметра Р. В системе ОС формируется разностный сигнал, пропорциональный величине ∆P = P - Po, который усиливается до нужной величины и подается на исполнительный элемент ИЭ. Исполнительный элемент отрабатывает данный разностный сигнал, приближая зонд к поверхности или отодвигая его до тех пор, пока разностный сигнал не станет равным нулю. Таким образом можно поддерживать расстояние зонд-образец с высокой точностью. В существующих зондовых микроскопах точность удержания расстояния зонд-поверхность достигает величины ~ 0.01 Å. При перемещении зонда вдоль поверхности образца происходит изменение параметра взаимодействия Р, обусловленное рельефом поверхности. Система ОС отрабатывает эти изменения, так что при перемещении зонда в плоскости X,Y сигнал на исполнительном элементе оказывается пропорциональным рельефу поверхности. Для получения СЗМ изображения осуществляют специальным образом организованный процесс сканирования образца. При сканировании зонд вначале движется над образцом вдоль определенной линии (строчная развертка), при этом величина сигнала на исполнительном элементе, пропорциональная рельефу поверхности, записывается в память компьютера. Затем зонд возвращается в исходную точку и переходит на следующую строку сканирования (кадровая развертка), и процесс повторяется вновь. Записанный таким образом при сканировании сигнал обратной связи обрабатывается компьютером, и затем СЗМ изображение рельефа поверхности Z = f(x,y) строится с помощью средств компьютерной графики. Наряду с исследованием рельефа поверхности, зондовые микроскопы позволяют изучать различные свойства поверхности: механические, электрические, магнитные, оптические и многие другие. В основе работы АСМ лежит силовое взаимодействие между зондом и поверхностью, для регистрации которого используются специальные зондовые датчики, представляющие собой упругую консоль с острым зондом на конце (рис. 2). Сила, действующая на зонд со стороны поверхности, приводит к изгибу консоли. Регистрируя величину изгиба, можно контролировать силу взаимодействия зонда с поверхностью.
ачественно работу АСМ можно пояснить на примере сил Ван-дер-Ваальса [32]. Наиболее часто энергию ван-дер-ваальсова взаимодействия двух атомов, находящихся на расстоянии r друг от друга, аппроксимируют степенной функцией - потенциалом Леннарда-Джонса:
Первое слагаемое в данном выражении описывает дальнодействующее притяжение, обусловленное, в основном, диполь - дипольным взаимодействием атомов. Второе слагаемое учитывает отталкивание атомов на малых расстояниях. Параметр ro – равновесное расстояние между атомами, U0 - значение энергии в минимуме.
Потенциал Леннарда-Джонса позволяет оценить силу взаимодействия зонда с образцом. Общую энергию системы можно получить, суммируя элементарные взаимодействия для каждого из атомов зонда и образца.
Тогда для энергии взаимодействия получаем:
Где ns(r) и np(r\)- плотности атомов в материале образца и зонда. Соответственно сила, действующая на зонд со стороны поверхности, может быть вычислена следующим образом:
В общем случае данная сила имеет как нормальную к поверхности, так и латеральную (лежащую в плоскости поверхности образца) составляющие. Реальное взаимодействие зонда с образцом имеет более сложный характер, однако основные черты данного взаимодействия сохраняются - зонд АСМ испытывает притяжение со стороны образца на больших расстояниях и отталкивание на малых. Получение АСМ изображений рельефа поверхности связано с регистрацией малых изгибов упругой консоли зондового датчика. В атомно-силовой микроскопии для этой цели широко используются оптические методы (рис. 4).
Оптическая система АСМ юстируется таким образом, чтобы излучение полупроводникового лазера фокусировалось на консоли зондового датчика, а отраженный пучок попадал в центр фоточувствительной области фотоприемника. В качестве позиционно - чувствительных фотоприемников применяются четырехсекционные полупроводниковые фотодиоды.
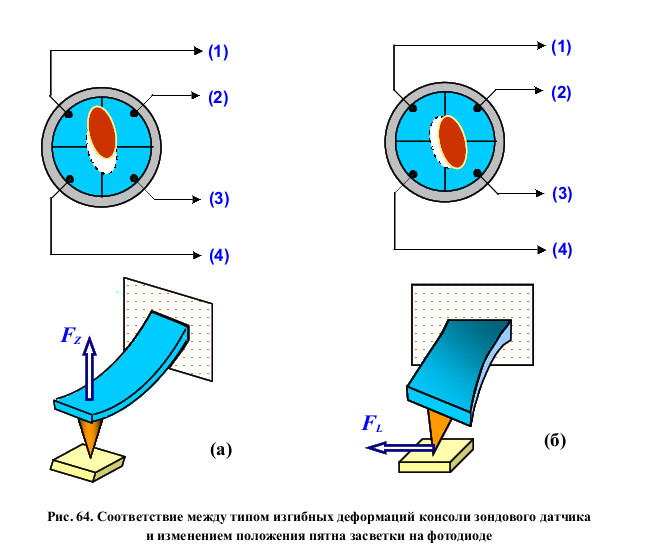
Основные регистрируемые оптической системой параметры - это деформации изгиба консоли под действием Z-компонент сил притяжения или отталкивания (FZ) и деформации кручения консоли под действием латеральных компонент сил (FL) взаимодействия зонда с поверхностью. Если обозначить исходные значения фототока в секциях фотодиода через I01, I02, I03, I04, а через I1, I2, I3, I4 - значения токов после изменения положения консоли, то разностные токи с различных секций фотодиода ∆Ii = Ii - I0i будут однозначно характеризовать величину и направление изгиба консоли зондового датчика АСМ. Действительно, разность токов вида
пропорциональна изгибу консоли под действием силы, действующей по нормали к поверхности образца (рис.5 (а)). А комбинация разностных токов вида
характеризует изгиб консоли под действием латеральных сил (рис. 5 (б)). Величина ∆Iz используется в качестве входного параметра в петле обратной связи АСМ (рис. 6). Система обратной связи (ОС) обеспечивает ∆Iz =const с помощью пьезоэлектрического исполнительного элемента, который поддерживает изгиб консоли ∆Z равной величине ∆Z задаваемой оператором.
При сканировании образца в режиме ∆Iz =const зонд перемещается вдоль поверхности, при этом напряжение на Z-электроде сканера записывается в память компьютера в качестве рельефа поверхности Z = f (x,y). Пространственное разрешение АСМ определяется радиусом закругления зонда и чувствительностью системы, регистрирующей отклонения консоли. В настоящее время реализованы конструкции АСМ, позволяющие получать атомарное разрешение при исследовании поверхности образцов. |