| ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса - ваш вокал Игровые автоматы с быстрым выводом Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Вкуснейший "Салат из свеклы с чесноком" Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека - Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
| Функциональные модули ТПТС
ФМ программно-технических средств ТПТС в составе систем низовой автоматики решают следующие задачи: - ввод информации от датчиков аналоговых или двоичных сигналов и преобразование их в цифровую форму, пригодную для арифметической и логической обработки микропроцессором; - прием информации, передаваемой по шине ввода/вывода от других компонентов системы (от других модулей, от устройств верхнего уровня); - арифметическая и логическая обработка принятой информации по заданному алгоритму, например, преобразование одной формы представления информации в другую, сравнение измеренных значений с уставками, выработка по результатам обработки управляющих воздействий и т.п.; - выдача управляющих сигналов на исполнительные устройства технологического процесса в виде двоичных или аналоговых сигналов; - выдача информации в виде аналоговых или двоичных сигналов на устройства регистрации, сигнализации или отображения, подключенные непосредственно к модулю; - выдача аналоговой или двоичной информации в цифровой форме через интерфейс шины ввода/вывода другим абонентам системы. По технологическим задачам ФМ можно разделить на четыре группы: - модули-регуляторы (1411, 1412); - модули управления (1717, 1719, 1723-01, 1725); - модули сбора и обработки аналоговых сигналов (1722, 1731, 1703); - модули сбора и обработки двоичных сигналов (1723, 1724). Модули-регуляторы представляют собой модули, которые располагают программно-аппаратными средствами для построения систем автоматического управления с замкнутым контуром регулирования. Модули имеют двоичные и аналоговые входы для организации обратных связей, двоичные входы и выходы для подключения пультов управления (мозаичных панелей), с помощью которых можно осуществлять ручное управление. В состав средств ТПТС входят два типа модулей-регуляторов: модуль S-регулятора 1411 с выдачей управляющих воздействий в виде релейного сигнала и модуль К регулятора 1412 с выдачей управляющих воздействий в виде аналогового сигнала. Модуль S-регулятора позволяет реализовать PI-закон регулирования; модуль К-регулятора - Р-, PI-, PD-, PID-законы регулирования. Модули управления представляют собой двоичные модули, располагающие специальными программными средствами, позволяющими проектировать систему автоматического управления с заданной иерархией управления. Модули группового и подгруппового управления осуществляют координацию взаимодействия ФМ низких уровней иерархии (1717, 1719) на этапе ввода технологического оборудования в работу, в режиме нормальной эксплуатации, на этапе вывода оборудования из работы (останова). Анализируя информацию о текущих параметрах и состоянии технологической системы и связывая команды управления от верхнего уровня управления с командами защит и блокировок, эти модули вырабатывают управляющие команды для модулей низких уровней управления в соответствии с заданным режимом работы технологической системы. Модули индивидуального управления непосредственно воздействуют на исполнительные механизмы (задвижки, двигатели, магнитные клапаны), выдавая управляющие сигналы по результатам анализа данных о состоянии оборудования, команд верхнего уровня и команд защит и блокировок. Информацию о параметрах и состоянии технологического процесса модули управления могут получать по шине ввода/вывода или от датчиков, подключенных непосредственно к входам модуля. Модули сбора и обработки аналоговых сигналов располагают аппаратно-программными средствами для сбора информации от датчиков аналоговых сигналов, преобразования аналоговых сигналов в цифровую форму и арифметико-логической обработки их по заданному алгоритму, а также вывода обработанной информации по шине ввода/вывода и в виде аналоговых и двоичных сигналов. Модули сбора и обработки двоичных сигналов располагают аппаратно-программными средствами для сбора, логической обработки по заданному алгоритму информации от двоичных датчиков (контакты реле, электронные двоичные датчики), а также для выдачи обработанной информации в виде двоичных сигналов. На рис. 1 изображена обобщенная структурная схема ФМ. В зависимости от типа модулей отдельные составные части, а именно: ЦАП, АЦП или устройства согласования уровней двоичных сигналов, могут отсутствовать. ФМ содержит процессорную часть, в состав которой входят микропроцессор 80188 и память процессора, состоящая из оперативной памяти (RAM) и постоянной программной памяти (FEPROM и EEPROM). В FEPROM хранятся программные блоки, выполняющие арифметические и логические функции, присущие всем модулям (сложение, умножение, дифференцирование, сравнение чисел и т.д.), программные блоки, реализующие функции, специфические для конкретного типа модулей (например, управляющие блоки для модулей управления или алгоритмы регулирования для модулей регуляторов), и программные блоки, реализующие функции контроля, логику сигнализации, логику обработки прерывания и т.п. Программные блоки записываются в FEPROM на этапе изготовления и не могут быть изменены. В EEPROM хранятся прикладные программы (перечень описаний программных блоков, в соответствии с которым они вызываются из FEPROM, настраиваются и выполняются). Данные в EEPROM записываются на этапе проектирования конкретной системы автоматизации и могут быть при необходимости изменены.
Рис. 4.1 Внутреннее устройство функционального модуля ТПТС
Для обмена информацией по шине ввода/вывода предназначена передающая память (URAM) - двухпортовое оперативное запоминающее устройство (ЗУ), доступное через один порт процессору ФМ, а через второй порт – процессору модуля УИ. АЦП предназначен для приема аналоговых сигналов через контакты соединителя Х2, мультиплексирования каналов и преобразования аналоговых сигналов в цифровую форму. ЦАП преобразует выходные сигналы из цифровой формы в аналоговую и коммутирует их на конкретные аналоговые выходы соединителя Х2. Схемы согласования уровней двоичных сигналов осуществляют передачу двоичных сигналов с входов соединителя Х2 к микропроцессору и от микропроцессора через выходные усилители на выходы соединителя Х2. Микропроцессор циклически опрашивает входы Х2 и URAM (информацию, принятую от модуля УИ), обрабатывает принятую информацию по заданной программе и выдает результаты обработки через выходы Х2 и записывает необходимую информацию в URAM для последующего считывания модулем УИ. Сбор, обработка и выдача информации может происходить в двух циклах: в коротком и длинном. Алгоритм, записанный в коротком цикле, выполняется периодически (период составляет от 23,3 до 86,6 мс, в зависимости от модуля). Алгоритм, записанный в длинном цикле, выполняется в интервалы времени, свободные от выполнения короткого цикла. Питание ФМ осуществляется, в основном, через контакты соединителя Х2, для чего в этом соединителе постоянно имеются контакты РМ, L+, M, MZ, BS, где: L+ — напряжение питания модуля, равное 24 B; PM — напряжение питания схем контроля, равное 24 B; M — опорный потенциал двоичных сигналов и аналоговых сигналов тока; MZ — опорный потенциал аналоговых сигналов напряжения; BS — мигающее напряжение 24 В с частотой 2 Гц для целей сигнализации. Напряжение 24 В (L+) подается на внутренний источник питания модуля, который формирует напряжения 5 В, минус 5 В, 15 В, минус 24 В и другие для питания микропроцессора, ЦАП, АЦП и т.д., что обеспечивает гальваническую развязку этих электронных устройств от входных и выходных цепей модуля. Напряжение 24 В (РМ) используется для питания схем контроля и схем формирования выходных двоичных сигналов. Питание этих схем от отдельного напряжения позволяет при любых отказах модуля, в том числе и при отказе внутреннего источника питания, установить двоичные сигналы управления в состояние логического “0”, а также сформировать и выдать на индикатор, установленный на передней панели модуля, сигнал о неисправности. Питание элементов шины ввода/вывода осуществляется от отдельного источника питания напряжением 5 В, поступающего в модуль через соединитель Х1. Это дает возможность исключить влияние отказов отдельных модулей на работоспособность шины. В ФМ опорные потенциалы М и MZ, к которым подключаются датчики, гальванически не связаны с нулевым потенциалом, к которому подключены схемы процессорной части модуля и шины ввода/вывода. Это обеспечивает защиту цифровых схем от помех на сигнальных линиях связи. ФМ имеют функции самоконтроля, обеспечиваемого как аппаратными, так и программными средствами. Самоконтроль позволяет оперативно фиксировать неисправности, что значительно снижает риск случайных ошибок в системах автоматизации, которые могут привести к аварийному состоянию. Выявленные неисправности оцениваются и по результатам оценки вырабатываются процедуры, блокирующие влияние неисправностей, формируются сообщения в СВБУ. Возникновение неисправностей индицируется светодиодами модулей. Функции контроля в модулях выполняются автоматически. Функции контроля в ФМ: а) циклические тесты FEPROM, EEPROM, RAM; б) контроль передачи данных по шине ввода/вывода; в) контроль функционирования микропроцессора схемой электронного сторожа WATCHDOG; г) контроль микропроцессором схемы WATCHDOG; д) аппаратный контроль внутренних номиналов напряжений на соответствие заданным значениям. Кроме этого, в зависимости от типа модуля, осуществляется программно-аппаратный контроль: датчиков и линий их подключения на обрывы и замыкания; выходных сигналов; схем согласования уровней; схем АЦП и ЦАП. В табл. 4.1 представлены все типы принимаемых аналоговых сигналов, а также максимальное количество каналов для каждого типа сигнала.
Таблица 4.1 - Типы принимаемых аналоговых сигналов
* Программное обеспечение модуля 1731 обеспечивает прием и обработку следующих типов стандартных термоэлектрических преобразователей, для которых в модуле предварительно заданы градуировочные таблицы: а) PtPh13-Pt (платина-13% родий/платина) тип R по ГОСТ Р 50431-92 для диапазона измеряемых температур от минус 50 до плюс 1769 б) PtPh10-Pt (платина-10% родий/платина) тип S по ГОСТ Р 50431-92 для диапазона измеряемых температур от 0 до плюс 1700 С; в) PtPh30-PtRh6 (платина-30% родий/платина 6% родий) тип B по ГОСТ Р 50431-92 для диапазона измеряемых температур от 0 до плюс 1820 С; г) Fe-CuNi (железо/медь-никель или железо/константан) тип J по ГОСТ Р 50431-92 для диапазона измеряемых температур от минус 210 до плюс 1200 С; д) Cu-CuNi (медь/медь-никель или медь/константан) тип T по ГОСТ Р 50431-92 для диапазона измеряемых температур от минус 270 до плюс 400 С; е) NiCr-CuNi (никель-хром/медьникель или никель-хром/константан) тип E по ГОСТ Р 50431-92 для диапазона измеряемых температур от минус 270 до плюс 1000 С; ж) NiCr-NiAl (никель-хром/никельалюминий или никель-хром/алюмель) тип K по ГОСТ Р 50431-92 для диапазона измеряемых температур от минус 200 до плюс 1300 С; з) Fe-CuNi (FeKo) (железо/медь-никель или железо/константан) тип L по DIN 43710 для диапазона измеряемых температур от - 200 до + 900 С. Подключение измерительных преобразователей осуществляется через следующие контакты на аппаратном интерфейсе Х2:
Типовые схемы подключения при не резервированном и резервированном режиме приведены на рис. 4.2 - 4.10 (для модуля 1731):
Рис. 4.2 Нерезервированная схема подключения термопреобразователя
Рис. 4.3 Резервированная схема подключения термопреобразователя
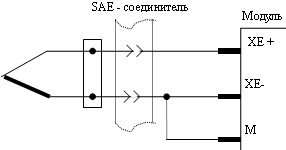
Рис. 4.4 Подключение термопары для измерения абсолютной температуры при не резервированном режиме
Рис. 4.5 Подключение термопары для измерения разности температур при не резервированном режиме
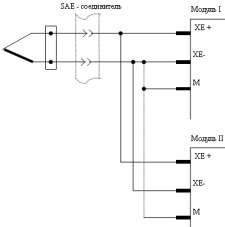
Рис. 4.6 Подключение термопары для измерения абсолютной температуры при резервированном режиме
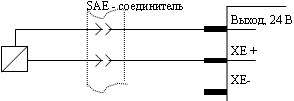
Рис. 4.7 Подключение датчика с выходом 0/4...20 мА (не резервированное)
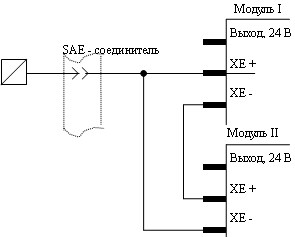
Рис. 4.8 Подключение датчика с выходом 0/4...20 мА (резервированное)
При резервированном подключении измерительных преобразователей тока 0(4)...20 мА в схеме подключения должны использоваться внешние стабилитроны 3,1 В или 1,6 В, смонтированные непосредственно на аппаратном интерфейсе Х2 в виде сборки С79451-А3117.
Рис. 4.9 Подключение датчика с выходом 0/2...10 В (не резервированное)
Рис. 4.10 Подключение датчика с выходом 0/2...10 В (резервированное)
Подключение измерительных преобразователей к модулю 1722 осуществляется через 3 контакта (ХЕ+, ХЕ-, выход питания) на аппаратном интерфейсе Х2 для каждого из 14 измерительных каналов. Для всех не подключаемых каналов необходимо выполнять соединение ХE- с шиной M или Mz приборной стойки. Типовые схемы подключения при не резервированном режиме приведены на рис. 4.11-4.15 (для модуля 1722).
Рис. 4.11 Схема подключения измерительного преобразователя с токовым выходом и питанием от модуля
Рис. 4.12 Схема подключения измерительного преобразователя с выходом напряжения и питанием от модуля
Рис. 4.13 Схема подключения датчика с внешним питанием
Рис. 4.14 Схема приема сигнала напряжения при резервированном режиме
Рис. 4.15 Схема приема токового сигнала при резервированном
Для питания измерительных преобразователей на модуле 1722 предусмотрено 14 дискретных выходов. В табл. 4.2 приведены нагрузочные характеристики дискретных выходов в зависимости от предохранителя.
Таблица 4.2 - Нагрузочные характеристики дискретных выходов в зависимости от модульного предохранителя.
По умолчанию выходы на модуле 1722 не выдают питающее напряжение, поэтому их следует включать при программной настройке измерительных каналов. Для выходов осуществляется проверка выдачи питающего напряжения через обратное считывание. Цепь питания выполнена с защитой от перегрузки (например, от короткого замыкания на землю), которая обеспечивает разрыв цепи питания. При резервированном режиме работы предусмотрен режим параллельного питания дискретных датчиков, при котором напряжение питания выдается как основным, так и резервным модулями. Параллельный режим питания для всех каналов может быть отключен с помощью маркера PGVA. При этом дискретные выходы резервного модуля не будут выдавать питающее напряжение. Для обеспечения сохранения функции контроля выдачи питания при параллельном режиме раз в 30 мин проводится отключение одного из дискретных выходов на время, достаточное для проведения контроля. При внешнем питании каждый измерительный канал должен быть защищен от перегрузки больше 0,5 А для защиты внутренних входных цепей. На модуле 1731 предусмотрено 8 дискретных выходов 24 В/100мА для питания измерительных преобразователей. Суммарный ток нагрузки по этим выходам не должен превышать 600 мА. Аппаратная настройка каналов модуля 1722 производится в зависимости от типа принимаемого сигнала (сигнал тока или напряжения) и режима работы (резервированный/не резервированный). Аппаратная настройка каналов осуществляется с помощью установки кодирующих перемычек на модуле. Описание установки кодирующих перемычек см. ТО модулей. Все каналы модуля, в том числе и не используемые должны настраиваться для приема одного и того же типа сигнала. Смешивание в одном модуле сигналов тока и напряжения не допускается. Аппаратная настройка измерительных каналов модуля 1731 (1703). Следующие параметры устанавливаются при настройке (модуль 1731): 1) Защита аналоговых входов. По умолчанию предел по напряжению для входов X+, X- составляет 3,5 В. 2) Настройка постоянной времени интегрирования АЦП на частоту сети питания 50 Гц или 60 Гц с целью подавления помех (дополнительно настраивается программно через маркер FREQUE). По умолчанию установлена настройка на частоту 50 Гц. Для модуля ТПТС51.1703 - определение каналов 5...18 или 19...32. При использовании двух модулей расширения необходимо для каждого модуля расширения задать соответствующие ему каналы 5...18 или 19...32. По умолчанию установлены каналы 5 ... 18. Аппаратная настройка каналов осуществляется с помощью установки кодирующих перемычек на модуле. Описание установки кодирующих перемычек см. ТО модулей. Программная настройка измерительных каналов модуля 1722. В модуле осуществляется аналого-цифровое преобразование аналогового сигнала, контроль измерительного канала, линейное преобразование аналогового сигнала в соответствии с границами физического диапазона и его дальнейшая обработка в соответствии с пользовательской структурой. Для активизации всех этих функций необходима программная настройка измерительных каналов. При программной настройке каналов задаются следующие параметры для каждого канала: а) номер канала (от 1 до 14); б) тип входного сигнала (напряжение/ток, ноль диапазона); в) физические верхняя и нижняя границы измерительного диапазона; г) включение дискретного выхода для питания измерительного преобразователя. Программная настройка измерительных каналов модулей 1731 и 1703. Для приема модулем аналогового сигнала, его усиления, аналого-цифрового преобразования и обработки необходима программная настройка измерительных каналов. При параметрировании аналоговых входов задают номер канала, тип датчика для этого канала, а также специфичные параметры в зависимости от выбранного типа датчика (см. табл. 4.3).
Таблица 4.3 - Параметрирование аналоговых входов
Если границы измерительного диапазона не заданы, то они устанавливаются по умолчанию. Измерительный диапазон [XA, XE] не должен быть меньше минимального диапазона измерения, который задан для каждого типа измерительного преобразователя. Если задан диапазон меньше минимально допустимого, то автоматически устанавливается: а) для термопреобразователей сопротивления XE = XA + min. диапазон; б) для термоэлектрических преобразователей XE = XA + min. диапазон, при этом если XE больше максимального табличного значения, то XE равно максимальному табличному значению, а XA = XE + min. диапазон.
Рис. 4.16 Параметры аппроксимирующей прямой
Рассмотрим, как происходит вычисление параметров аппроксимирующей прямой для термоэлектрического преобразователя с нелинейной характеристикой, не проходящей через нулевую точку (рис. 4.16).
Параметр T0 (см. рис. 4.16) определяет температуру, при которой напряжение с термопары равно нулю.
При настройке канала необходимо установить стандартный коэффициент пропорциональности равным 1 и ввести напряжение при температуре холодного спая. Затем в пользовательской структуре умножить значение входного аналогового сигнала на расчетный коэффициент К и сложить получившееся значение с расчетным значением T0. Таким образом, алгоритм программной обработки аналогового сигнала будет иметь следующий вид (рис. 4.17):
Рис. 4.17 Алгоритм программной обработки сигнала
Контроль измерительного диапазона для модуля 1722. Для всех определенных в программной конфигурации измерительных каналов производится контроль измерительного диапазона. Существует возможность определения более жестких требований к измерительному диапазону через установку маркера NAMUR. В табл. 4.4. приведены контролируемые границы измерительного диапазона: Таблица 4.4 - Контролируемые границы измерительного диапазона
Допускается возможность блокировки контроля по верхней границе измерительного диапазона для каждого канала с помощью установки маркера SPUE. Выход за пределы границ измерительного диапазона приводит к изменению дискретного сигнала достоверности NV данного канала.
Формирование дискретного сигнала достоверности. Для каждого измерительного канала в модуле автоматически формируется специальный дискретный сигнал NV, по которому определяется его достоверность. При этом: значение «0» дискретного сигнала => аналоговый сигнал достоверен; значение «1» дискретного сигнала => аналоговый сигнал недостоверен. Сигнал достоверности формируется по ряду признаков, получаемых при контроле измерительных каналов (табл. 4.5).
Таблица 4.5 - Признаки формирования сигналов достоверности
Свободно проектируемый признак служит для обеспечения возможности создания дополнительных пользовательских признаков формирования сигнала достоверности по каждому каналу. Например, формировать дискретный сигнал достоверности по изменению величины входного аналогового сигнала или по скорости изменения его величины. Дискретный сигнал достоверности аналогового сигнала используется для различных целей, в том числе: отображение достоверности аналогового сигнала на верхнем уровне; в алгоритмах регулирования и управления исполнительными механизмами; в алгоритмах защит и сигнализации и т.д. Дискретный сигнал достоверности автоматически передается по шине вместе с входным аналоговым сигналом, соответствующего измерительного канала. Таким образом при приеме аналогового сигнала на верхнем уровне или в другом модуле, одновременно происходит оценка его достоверности по значению сигнала NV. Для расчетных аналоговых сигналов также предусмотрены дискретные сигналы достоверности BB, которые автоматически передаются с ними по шине. Признаки формирования этих сигналов определяются проектным путем.
Таблица 4.6 - Распределение сигналов достоверности
Средства ТПТС обеспечивают выдачу нормированных аналоговых сигналов 0(4)...20 мА или 0(2)...10 В в следующем объеме:
На модуле 1731 имеются 8 выходных аналоговых каналов, первые 4 из которых, используются только для выдачи сигналов напряжения, остальные 4 только для выдачи токовых сигналов. Для каждого из 4 токовых каналов предусмотрена возможность последовательного подключения до трех потребителей тока. Для выдачи аналоговых сигналов на модуле 1722 предусмотрено 14 контактов на аппаратном интерфейсе Х2. При подключении для всех каналов используется общая шина приборной стойки Mz (рис. 4.18-4.19). Функция выдачи аналогового сигнала является резервируемой, при этом на резервном модуле функция выдачи аналогового сигнала отключается. Следует избегать замыкания аналоговых выходов на напряжение больше 15 В, т.к. это приводит к выходу из строя аналоговых выходов.
Рис. 4.18 Схема подключения аналогового выхода (без резервирования)
Рис. 4.19 Схема подключения аналоговых выходов (с резервированием)
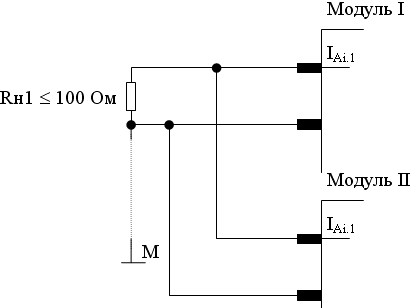
Для выдачи сигналов напряжения на модуле 1731 предусмотрено 4 контакта и 12 контактов для выдачи токовых сигналов, объединенных в 4 группы по три контакта. При подключении к аналоговому каналу только одного потребителя по току, его сопротивление не должно превышать 600 Ом. При подключении к аналоговому каналу более одного потребителя тока (до трех), сопротивление каждого из потребителей тока не должно превышать 100 Ом (рис. 4.20-4.21). Внутренние стабилитроны модуля обеспечивают последовательное подключение до 3-х потребителей к одному токовому каналу, таким образом, чтобы при выходе из строя любого из потребителей (например, разрыв цепи), токовый сигнал продолжал бы поступать на остальные потребители. Для каналов с выходом напряжения максимальный ток нагрузки не должен превышать 1мА.
Рис. 4.20 Подключение потребителей тока при нерезервированном режиме
Рис. 4.21 Подключение потребителей тока при резервированном режиме
Программная настройка выходных аналоговых каналов. При выдаче аналогового сигнала в модуле осуществляется линейное преобразование аналогового сигнала в соответствии с установленными границами физического диапазона, контроль выходного канала, цифро-аналоговое преобразование сигнала и его вывод на аппаратный интерфейс Х2. Для активизации всех этих функций необходима программная настройка выходных аналоговых каналов. При программной настройке задается номер выходного аналогового канала, ноль диапазона (DZ/LZ) и границы физического диапазона XA/XE. Программная настройка осуществляется как для модуля 1722, так и для модуля 1731 (1703).
Контроль выходного аналогового канала для модуля 1722. Выходной аналоговый канал проверяется по верхней и нижней границе диапазона напряжения 0(1,85) ... 10,5 В. При превышении в течении двух циклов допустимого диапазона происходит сигнализация канальной ошибки и выходной сигнал устанавливается соответственно на минимальное или максимальное значение. Данный контроль осуществляется последовательно каждый цикл для одного канала. Таким образом, общее время проверки для всех каналов составляет примерно 650мс. Для выходных каналов резервного модуля этот контроль не проводится. Контроль выходного аналогового сигнала для модуля 1731. Четыре выходных токовых канала проверяются на обрыв внешних цепей. С помощью маркера STRST этот контроль может блокироваться. Для каждого канала результат контроля отображается в маркере FESTRO. При конфигурации с подключением до 3-х потребителей тока контроль на обрыв цепи не проводится. Как правило, выходные аналоговые каналы на модуле 1731 используются в качестве измерительных преобразователей входного сигнала от термопар или термопреобразователей сопротивления в нормированный сигнал 0(2)...10 В или 0(4)...20 мА. Далее это сигнал можно по проводам передавать на другие модули, например на модуль K- регулятора 1412. При этом сопротивление входных цепей регулятора не должно превышать указанные выше значения для аналоговых выходов. Для выходного аналогового сигнала рекомендуется формировать сопроводительный дискретный сигнал достоверности через аппаратный интерфейс Х2, т.к. по самому значению аналогового сигнала нельзя определить его достоверность. Значение дискретного сигнала достоверности можно формировать по следующим признакам: а) обрыв цепи выходного токового канала; б) по сигналу достоверности соответствующего измерительного канала; в) проектируемые признаки. Для выдачи дискретных сигналов на модуле 1731 имеются 8 дискретных выходов. Программно-технические средства ТПТС обеспечивают прием дискретных сигналов в следующем объеме (см. табл. 4.7) (рис. 4.22-4.31):
Таблица 4.7 – Подключение дискретных сигналов к ТПТС
«Сухой контакт» — термин, означающий отсутствие у такого контакта гальванической связи с цепями электропитания и «землёй», то есть контакт гальванически развязан от управляющего сигнала. В идеальном виде «сухим контактом» являются контакты обычной механической кнопки или геркона и контакты реле (электромагнитных, оптических). Также в качестве сухого контакта могут выступать обычный и концевой выключатели. Для «сухого контакта» нет разницы, какой используется ток — постоянный или переменный, а также безразлична полярность подключения такого контакта. В типовые схемы подключения датчиков могут входить контрольные резисторы для обеспечения контроля неисправностей цепей датчика.
Рис. 4.22 Подключение контакта при не резервированном режиме
Рис. 4.23 Подключение “сухого” контакта при не резервированном режиме
Рис. 4.24 Подключение “сухого” контакта с параллельным резистором при не резервированном режиме
Рис. 4.25 Подключение “сухого” контакта с параллельным и последовательным резисторами при не резервированном режиме
Рис. 4.26 Подключение перекидного контакта с параллельным резистором при не резервированном режиме по двухпроводной связи
Рис. 4.27 Подключение перекидного контакта c параллельным и последовательным резисторами при не резервированном режиме по двухпроводной связи
Рис. 4.28 Подключение перекидного контакта при не резервированном режи- ме по трех проводной связи
Рис. 4.29 Подключение перекидного контакта c параллельным резистором при не резервированном режиме по трех проводной связи
Рис. 4.30 Подключение перекидного контакта c параллельным и последовательным резисторами при не резервированном режиме по трех проводной связи
Для питания дискретных датчиков на модуле 1723 предусмотрено 28 дискретных выходов 24 В. Таким образом для всех подключаемых "сухих" контактов на модуле имеются индивидуальные выходы питания. Каждый выход допускает нагрузку до 120 мА. Суммарный ток нагрузки по всем дискретным выходам не должен превышать 2 А. Усилители дискретных выходов выполнены с защитой от короткого замыкания. Выходы питания контролируются с помощью обратного считывания выходного напряжения внутри модуля. Обнаружение неисправности происходит через сигнал KFBA для каждого выхода. Все дискретные выходы через программную или аппаратную настройки могут быть определены как дискретные входы. При резервированном режиме работы предусмотрен режим параллельного питания дискретных датчиков, при котором напряжение питания выдается как основным, так и резервным модулями. Параллельный режим питания для всех каналов может быть отключен с помощью маркера PGVA. При этом дискретные выходы резервного модуля не будут выдавать питающее напряжение. Для обеспечения сохранения функции контроля питания при параллельном режиме один раз в 30 мин проводится отключение одного из дискретных выходов на время, достаточное для проведения контроля. При аппаратной настройке дискретных каналов выполняются следующие операции: 1) снятие для групп входов коммутации относительно потенциала -24 В; 2) определение групп свободных входов/выходов в качестве контролируемых входов; 3) переопределение сигнализационного выхода в свободный вход/выход. Аппаратная настройка каналов осуществляется с помощью установки кодирующих перемычек на модуле. Описание установки кодирующих перемычек см. ТО модулей. При поставке с завода-изготовителя первые 36 дискретных входов на модуле коммутируются относительно потенциала -24 В, таким образом, чтобы на соответствующих подключенных контактах создавалось напряжение 48 В. При аппаратной настройке коммутация относительно -24 В может быть снята для одной группы из 4 входов или для четырех групп по 8 входов. Дискретные каналы 29...36 могут использоваться по умолчанию как входы или выходы. Однако, при использовании их в качестве входов для подключения дискретных датчиков с последовательными и(или) параллельными контрольными резисторами, необходимо аппаратно настроить их в качестве контролируемых входов. Настройка происходит для канала индивидуально. При поставке с завода-изготовителя один из дискретных выходов определен как выход сигнализации с мигающим напряжением. Имеется возможность переопределения его в качестве свободного входа/выхода. Программная настройка дискретных каналов. В модуле происходит считывание дискретных сигналов, фильтрация помех, обработка переходных процессов при переключении контактов, контроль канала, обработка сигналов, а также выдача питающего напряжения. Для активизации этих функций при программной настройке необходимо выполнить следующие действия: Выбор программного цикла обработки входных каналов. Считывание, обработка и выдача дискретных сигналов происходит в программном цикле SZYK равным 26,7 мс. Кроме цикла SZYK в модуле 1723 предусмотрен специальный цикл MZYK, который каждые 10 мс прерывает выполнение SZYK для опроса и выдачи прерываний по определенным в нем дискретным входам. Этот цикл служит для быстрого опроса состояния дискретных входов. В MZYK допускается определять следующее количество дискретных каналов: 56 простых контактов, 14 перекидных контактов. Чем больше входных каналов определено в MZYK, тем меньше времени остается на обработку пользовательской структуры в SZYK. Определение номера канала и типа подключения дискретных датчиков. От выбора типа зависит число входных контактов (1 или 2) на аппаратном интерфейсе модуля, необходимых для подключения данного типа контактов дискретных датчиков и тип контроля для этого канала.
Номер канала для перекидных контактов, подключаемых по трех проводной связи, задается только нечетными числами, например 7, 9, 11 и т.д. При этом: а) нормально-разомкнутым контактам соответствуют входы с нечетными номерами - по номеру канала; б) нормально-замкнутым контактам соответствуют входы с четными номерами. Таким образом, например, для канала 7 - нормально-разомкнутый контакт подключается к входу 7, а нормально-замкнутый контакт к входу 8. С помощью включения маркера FESOE допускается возможность обработки значений обоих контактов (по умолчанию эта возможность включена). Определение параметров обработки входов по прерываниям, параметров блокировки дребезга и обработки времени переключения контактов. Данные параметры задаются только для каналов с номерами 1...36. Механизм прерываний (запрос на передачу сигнала в шину, при изменении состояния), а также алгоритмы обработки дребезга и времени переключения контактов включаются по каналам, однако время переключения и время блокировки дребезга задаются сразу для всех каналов. Это приводит к необходимости задания максимальных значений этих параметров для всех датчиков, подключенных к модулю. При включении механизма прерываний для каждого канала выбирается фронт дискретного сигнала, по которому происходит прерывание: по переднему фронту, по заднему фронту, по переднему и заднему фронтам. Время подавления дребезга задается в маркере ZFU в пределах 0...840 мс. При задании большего значения время блокировки автоматически устанавливается на значение 840 мс. Задаваемое значение автоматически округляется с шагом 3,3 мс. По умолчанию время блокировки дребезга составляет 800 мс. Время переключения контактов устанавливается в маркере SZ. По умолчанию значение этого параметра составляет 50 мс. Задаваемое значение автоматически округляется с шагом 3,3 мс. По умолчанию дискретные выходы не выдают питающее напряжение. Для выполнения функции питания дискретных датчиков необходимо включать соответствующие дискретные выходы. На модуле проводится контроль входных дискретных каналов на следующие типы ошибок: обрыв цепей подключения датчика (DB); замыкание на М - потенциал (по входу или по питающему выходу) (MS); замыкание на потенциал L+ (AS); несоответствие (при трех проводной связи) (AVV). Ошибка несоответствия возникает при присутствии одновременно на замкнутом и разомкнутом контактах значений "1" или "0". Контроль на несоответствие блокируется на время переключения контактов SZ. Типы контролируемых ошибок определяются при выборе схемы подключений контактов дискретных датчиков (см. табл).
Таблица 4.9 – Типы контролируемых ошибок
Примечание: *Контроль проводится для обоих контактов. В случае возникновения ошибки на любом контакте происходит обнуление значений для обоих контактов, но ошибка сигнализируются только по нормально-замкнутому контакту, т.е. по нечетному входу.
Формирование дискретного сигнала достоверности. Для входных дискретных каналов 1...36 в модуле автоматически формируются специальные дискретные сигналы NV, по которым определяется их достоверность: значение «0» сигнала NV => дискретный сигнал достоверен; значение «1» сигнала NV=> дискретный сигнал недостоверен. Свободно проектируемый признак FKF служит для обеспечения возможности создания проектным путем дополнительных признаков формирования сигнала достоверности. Например, в качестве дополнительного признака может быть использован сигнал отказа питания датчика. Для перекидных контактов, подключенных по трех проводной связи, обрабатываются только FKF для нечетных входов. В отличие от сигналов достоверности для аналоговых каналов (например, на модуле 1722), сигналы достоверности для дискретных каналов не передаются автоматически по шине вместе с соответствующими дискретными сигналами. Передача этих сигналов организовывается при проектировании. Блокировка прерываний при сигнализации системных ошибок на модуле 1723. В модуле предусмотрен механизм блокировки выдачи прерываний в шину ввода/вывода по системным ошибкам. К этому типу ошибок относятся все ошибки, приводящие к формированию сигнала достоверности NV. Механизм контроля необходим для предотвращения перегрузки шины ввода/вывода от большого количества прерываний в течении короткого промежутка времени. В течение промежутка времени tF ведется контроль числа прерываний AF. В случае превышения этого значения дальнейшие прерывания в шину ввода/вывода блокируются. Далее в течении следующего отрезка времени tF алгоритм контроля повторяется, причем блокировка прерываний не снимается. Если в течении этого времени число прерываний не превысило заданное значение, то блокировка снимается. На все время блокировки выдачи прерываний сигнал канальной ошибки KFV также является постоянно активным. Сигнал достоверности NV не активизируется. Время блокировки tF задается в пределах 1...600 с (по умолчанию - 10) в маркере SPZFU. Число прерываний AF задается в пределах 2...1000 (по умолчанию - 5) в маркере IPANZFU. Оба параметра задаются одновременно для всех каналов. Информация о состоянии механизма подавления дребезга содержится в дискретном маркере FUA по каждому каналу. Организация каналов приема дискретных сигналов на модуле 1717 (1719). На модуле может быть обеспечен прием до 35 дискретных сигналов (69 сигналов с модулем расширения 1719). При резервированном режиме работы не допускается использовать вход E,S,13. Для свободного приема и обработки дискретных сигналов при программной настройке не допускается конфигурирование функций управления исполнительными механизмами, предусматривающих жесткую настройку каналов модуля. При не использовании функций управления исполнительными механизмами, модуль используется для сигнализационных функций (MF), которые предусматривают свободное распределение и обработку каналов модуля. На модуле имеется 19 дискретных выходов 24 В (или 41 выход с модулем расширения 1719). При резервированном режиме работы не допускается использовать выход A,S,19. Усилители дискретных выходов выполнены с защитой от короткого замыкания. Максимальная нагрузка на каждый выход составляет 120 мА (4 выхода на модуле 1717 настроены на ток -120 мА). По умолчанию выходы не выдают питающее напряжение, поэтому их следует включить при программной конфигурации. На модуле производится контроль дискретных выходов. При контроле на каждый выход циклически подается значения “0” или “1” затем производится обратное считывание с проверкой выданного значения. Время контрольного импульса составляет 600 мкс. Существует возможность отключения контроля всех дискретных выходов через маркер BATAB. В случае обнаружения неисправности, устанавливаются следующие сигналы - FBAMG - неисправность дискретного выхода на основном модуле 1717 - FBAEBG - неисправность дискретного выхода на модуле расширения 1719 Номер первого неисправного дискретного выхода фиксируется в аналоговом маркере BATZAE. При резервированном режиме работы предусмотрен режим параллельного питания дискретных датчиков, при котором напряжение питания выдается как основным, так и резервным модулями. Параллельный режим питания для всех каналов может быть отключен с помощью маркера PGVA. При этом дискретные выходы резервного модуля не будут выдавать питающее напряжение. При параллельном режиме питания контроль дискретных выходов для модуля 1717 не проводится. При отключенном параллельном режиме контроль проводится только на основном модуле. Аппаратная настройка дискретных каналов. При поставке с заводаизготовителя входы E,S,15 - 35 на модуле 1717 и входы E,S,36 - 69 на модуле 1719 коммутируются относительно потенциала -24 В, таким образом, чтобы на соответствующих подключенных контактах создавалось напряжение 48 В. При аппаратной настройке коммутация относительно -24 В может быть снята для входов, объединенных в несколько групп. Для приема сигналов с активным нулем (“0” - 24 В) предусмотрена соответствующая настройка для группы входов E,S,9 - 18. Аппаратная настройка каналов осуществляется с помощью установки кодирующих перемычек на модуле. Автоматическое регулирование.В модулях 1411 и 1412 могут быть реализованы все задачи автоматического регулирования, такие как автоматическая стабилизация значений технологических параметров и их изменение по заданному закону. Мощными дополнительными возможностями модулей являются: реализация алгоритма адаптации зоны нечувствительности регулятора в зависимости от уровня возмущений, автоматическая корректировка значения коэффициента усиления регулятора с целью исключения автоколебаний в режиме одного кратковременного включения (в модуле 1411) и алгоритм нелинейного преобразования с переменным коэффициентом усиления на входе регулятора (в модуле 1412). В целом концепции структуры обоих модулей 1411 и 1412 достаточно близки. Основу алгоритма импульсного, или ступенчатого, управления исполнительными механизмами регулирующих органов с постоянной скоростью перемещения составляет ПД-преобразователь, реализованный в базовом программном обеспечении каждого из каналов модуля 1411 и представляющий собой трехпозиционный релейный элемент с гистерезисом, охваченный цепью обратной связи в виде апериодического звена 1-го порядка. В модуле могут быть реализованы два идентичных независимых канала управления регулирующей арматурой. Непрерывные ПИ- или ПИД-законы регулирования, используемые в корректирующих контурах многоконтурных схем или для управления специфическими регулирующими органами (например, двигателями с переменной скоростью перемещения), являются частью базового программного обеспечения модуля каждого из каналов модуля 1412, также имеющего двухканальную структуру. Структура одного канала модуля импульсного регулирования 1411 и модуля непрерывного регулирования 1412 включает в себя как минимум два блока базового программного обеспечения: собственно алгоритм регулирования и стандартную логику переключений. Пользователь может также самостоятельно конфигурировать алгоритмы формирования обобщенного сигнала регулируемой величины и логической обработки дискретных сигналов и команд. Кроме вышеперечисленного в структуру алгоритма регулирования может быть включен блок формирования задания (задатчик). Формирование обобщенного сигнала регулируемой величины производится на основе прямых или динамически преобразованных сигналов технологических параметров (регулируемых величин). Как правило, эти сигналы передаются по цифровой шине от модулей АСУ ТП, специально предназначенных для ввода и обработки аналоговой информации (1722, 1731), но они могут вводиться в модули регулирования и непосредственно - через аппаратный интерфейс. В схеме стандартной логики переключений в одном канале модулей регулирования реализуется комплекс логических функций, задающих режим работы регулятора, таких как: 1) прием и обработка управляющих команд "Меньше"/"Закрыть", "Больше"/"Открыть" и "Автоматический / Ручной Режим" – от оператора, с устройств проведения наладочных работ или по командам логических автоматов (блокировок, технологических программ пуска/останова и т.п.); 2) прием и обработка команд защит, имеющих высший приоритет по отношению к другим командам (как ручным, так и автоматическим) и действующих в обход ограничивающих сигналов; 3) формирование команд ограничения/разрешения прохождения дискретных сигналов "Меньше/Больше" с возможностью отдельного ограничения/разрешения прохождения команд регулятора; 4) прием и обработка признаков сбоев (отказов) от исполнительного механизма и от участвующих в формировании регулируемой величины датчиков, с автоматическим переводом регулятора в режим ручного управления и соответствующей сигнализацией оператору; 5) представление информации оператору о режимах работы регулятора и о текущем состоянии регулирующих органов, а также задействованных в алгоритмах датчиков, рассогласовании на входе регулятора с сигнализацией в случае его недопустимо большой величины и т.п. Формирование заданного значения регулируемой величины осуществляется в блоке формирования задания. Блок задатчика допускает формирование величины задания как в относительных, так и в абсолютных физических единицах. Блоки формирования задания позволяют: 1) прием и обработку управляющих команд "Меньше"/"Больше" (поступающих на интегратор с соответствующим перемещением последнего) и команд “Автоматический / Ручной Режим", а также величины заданного значения регулируемого параметра – от оператора, с устройств проведения наладочных работ или по командам логических автоматов (блокировок, технологических программ пуска/останова и т.п.); 2) формирование запретов изменения выходного сигнала задатчика в соответствующую сторону (например, при исчерпании диапазона подчиненного регулирующего органа); 3) реализация режима отслеживания текущего значения регулируемой величины (например, при переводе регулятора на ручное управление) с возможностью обеспечения безударного включения регулятора в работу на текущее или заданное значение регулируемой величины; 4) формирование динамической функции изменения задания по выбранному закону (например, в виде линейно-нарастающей функции); 5) представление информации оператору о режиме работы задатчика. Стандартное решение по управлению регулирующим клапаном с помощью модуля импульсного регулирования 1411 предусматривает использование двух (в каждую сторону) сигналов исчерпания диапазона регулирования: концевого выключателя и моментной муфты (если она имеется). В схеме стандартной логики переключений модуля по соответствующему дискретному сигналу от регулирующего клапана осуществляется прекращение подачи управляющей команды (как автоматической, так и ручной) в соответствующем направлении, а оператору выдается информация о невозможности действия в данном направлении. Одновременно в схеме управления клапаном разрывается цепь передачи команды в рассматриваемую сторону. На базе модуля 1412, формирующего по каждому из каналов непрерывный управляющий сигнал, можно реализовать П-, ПИ-, ПД- и ПИД-законы регулирования с раздельным подключением пропорциональной, интегральной и дифференциальной составляющих. Изменение структуры регулятора производится путем перепрограммирования внутренних переменных модуля 1412. Ограничение сигнала на выходе алгоритма регулирования может быть осуществлено не только через систему команд ограничения/разрешения (аналогично импульсному регулятору в модуле 1411), но и непосредственно - путем задания верхнего и нижнего пределов изменения выходного сигнала. Структура основных узлов модуля 1412, напрямую не связанных с алгоритмом регулирования и приемом/выдачей сигналов, большей частью повторяет структуру соответствующих узлов модуля импульсного регулирования 1411. Пошаговое логическое управление. Пошаговое логическое управление обеспечивает перевод технологической подсистемы (подгруппы, например, питательного насоса) в заданное состояние, например, из состояния резерва в состояние работы или, наоборот, в соответствии с заданной пошаговой программой. Эта функция выполняется модулем 1723-01. В процессе отработки одного шага управление подгруппой передает команды управления технологическому оборудованию и получает сигнал обратной связи о выполнении команд. Наличие сигнала о выполнении команд служат разрешением для перехода к следующему шагу программы, который, в свою очередь, также выдает команды. Управление подгруппой может работать в следующих режимах: 1) режим автоматического управления; 2) режим советов оператору (информационный режим); 3) режим тестирования при вводе в эксплуатацию. В режиме автоматического управления после выбора программы "останов/пуск" происходит пошаговая отработка программы. По завершении отработки программы оборудование переходит в заданное состояние. При активизации очередного шага программы происходит проверка условий этого шага. До исполнения условий шага выдается команда шага на подчиненный уровень управления. После выполнения условий активизируется следующий шаг программы. Программа продолжается аналогичным образом от шага к шагу. Текущий шаг, последующий шаг и отсутствующие критерии текущего шага инд |
















 XA, XE [ С]
XA, XE [ С] Температура рабочей точки [ С]
Температура рабочей точки [ С]





 XA, XE [ С]
XA, XE [ С] 















 на М
на М