| ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса - ваш вокал Игровые автоматы с быстрым выводом Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Вкуснейший "Салат из свеклы с чесноком" Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека - Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
| БАЛАНСИРСІЗ ТЕРБЕМЕЛІ - СТАНОК
Сурет 9.3 Балансирсіз тербемелі-станок үлгісі 1-рама; 2-стойка; 3-сальникті шток; 4-арқанды шктв; 5-траверса (шатунды ұстап тұратын бөлдік) және шатундар; 6-кривошип; 7-редуктор; 8-тормоз; 9-электрқозғалтқыш; 10-сыналы ремонтты беріліс.
Балансирсіз тербемелі-станок редуктор жетекті бөлігі (сур 9.3) балансирлі станок-качалканыкі сияқты. Балансирсіз станок качалкаың кривошипінің құрылымы біраз өзге V-тәрізді пішінді, бұрыш 30 градус. Соңғы көрсеткіш станоктың теңгеруі жақсартады және контр жүркедің салмағын азайтады. Кривошипта жүк балнсирлі тербемелі-станоктың кривошипындағыдай құрылымды орналасады. Ұңғы сағасының стінде еңістелген тіректе ролик орналасқан, ол арқылы траверсаға жалғанған иілгіш ілгек біріктірілген, ал ол өз кезенгінде шатундарға жалғанған. Балансирсіз тербемелі-станок басына 30 және 60кН жүк түсетіндей етіп шығарылған. Жүрістің ұзындығы 0.45-5м дейін. Редуктордың шығар білігіндегі айналау моменті 80 кН*М жетеді. Тербемелі-станок цифрында (мысалы МБС-1.8-700) келесі белгілеулер қабыланған: МБС– механикалық істі балансирсіз станок; 3- штангалар ілгегіндегі жүктеме, тс; 1.8 – жүріс ұзындығы, м; 700 – айналу моменті, кгс*м. Балансирсіз тербемелі-станок балансирлармен салыстырғанда аз метал сыйымдылықты және өлшемдері аз. Оларда штангалар ілгігіндегі нүктенің қозғалысының сипаттамасы іршама жақсартылған, бұл кезде гармониялық тербелістен ауытқу аз, сондықтан штангалар ілгегіндегі нүктенінің үдеуі және қоңдырғыдағы инерциялық жүктеу аз болады. Алайда иілгіш қатынастың жеткіліксіз беріктігі осы қоңдырғалардың еңгізілуін тежейді. Балансирсіз тербемелі-станок (сурет 9.3) шатун мен баласир иілгіш байланыспен ауыстырлады. Әртүрлі құрылымдардың – тізбек, иілгіш металды таспаның, бірнеше клинді белдіктердің, болатты арқанның иілгіш байланысы сыналды. Алайда олрадың барлығы байланыс бойынша ұзақ емес болып шықты, осы себептен осы элементтерді ауыстыруға байланысты жиі инерционды операцияларда жасау керек болды. Осығн байланысты соңғы кезде балансирсіз станок-качалкалар ұңғымаларды аз мерзімді және сынаулы пайдалану үшін қолданылады. Балансирсіз станок-качалкалардың азайтылған салмағы осы қоңдырғыны бір орыннан екінші жерге ауыстыруға ыңғайлы етеді.
Штангалы ұңғылы сорапты қоңдырғылардың гидравликалық және пневматикалық жетектері.
Сурет 9.4 Штангалы ұңғылы сорапты қоңдырғының гидрожетегі (сурет 9.4) атқарушы механизмнің жұмыс режимін реттейтін мүшелерге жұмыстың сұйықты беретін, яғни реттелгетін дроссель 4 және жіберуші клапан 7, содан кейін сұйық ағынын реттейтін залотник 6 және атқарушы механизм 5 беретін күштік сорапы бар 1, 2 қозғалтықтан құралған. Атқарушы мехнаизм барып-қайтатын немесе айналатаын қозғалысы жасай алады. (сурет 9.4.). Барып-қайтаытн қозғалыс кезінде жұмыс сұйығы кезекті түрде поршеннің бін не екінші жағына атқарылатын механизмнің цилиндрінің қуысына немесе уақыт сайын цилиндрідің бір қуысына беріледі. Одан кейін сұйық атқарылатын механизмнен золотник арқылы ыдыс 9 барады, одан ол қайтадан сораппен алынады, ыдыс саңылаусыздалнбааған болуы мүмкін, сол кезде сораптың қабылдау жерінде атмосфералық қысым ұсталынып тұруы мүмкін. Саңылаусыздалынған ыдысқа 10 онда жоғары қысым ұсталынып тұрады. Саңылаусыздалынған ыдыс 10 қолдану сораптың жететін бірқалыпты жүктеусіздігін жұмыс циклы барысында поршеннің бір жақтан екінші жаққа қарай жүрісін құруын жеңілдетеді. Ыдыстар негізінде сүзгіштермен, металды өнімдерді жоңқалаарды ұстайтын магнитті ұстағыштармен жабдықталған. Сұлбада қауыпты жоғарлатылғн қысым кезінде жіберетін канлды ыдыс 9-бен біріктіретін сақтандырушы клапан 8 қарастырылған. Гидрожетекте сүзгіш 3 қарастырылған – золотник 6 басқару қолмен және автоматты түрде іске асады. Соңғы кезде золотник жетегі механикалық датчиктарды келетін белгілермен басқарылады, олар жүйенің құбырлаына қосылған. Гидрожетектегі сорап, жетекте жұмыс поршеньді болады. Атқарушы механизмнің жұмыс режимін реттеген кезде. Сурет 9.4 келтірілген гидрожетек сұлбасы бойынша келесі үрде атқарылады. Реттеуші дроссельдің 4 өту қимасын төмендете отырып сораппен дроссель арасынад орналасқан құбырда және өзінде ағынның кедергісін жоғарлатады. Қысымды жоғарлатқан кезде өткізгіш клпан 7 сәл ашылады және сорап 2 берілетінсұйықтың жартысына ыдыс 9 жібереді. Нәтижесінде атқарушы механизмге аздап сұйық келетін болады және атқарушы механизмнің поршенінің қозғалуы жылдамдығы азаяды. Дроссльеді аша отырып және онда кедергіні азайта отырыып, поршень 5 қозғалысын жылдамдатуға болады. Атқаруыш механизмге түсірілетін жүктемені өзгерткен кезде сораптың шығар жерніде қысым автоматты түрде қысым өзгереді және өткізгіш клапанның сәйкес реттеуі кезінде оның жұмыс реижмі сақталады немесе өзгереді. Гидро және пневмо жетекті қоңдырғылардың штангалы сораптардың қоңдырғысында штангаларды қозғалысқа келітретін негізгі түйіннің сұлбасы бірдей болады. Штангалар шток цилиндрде орналасқан поршеньмен біріктіріледі. Шток сальник арқылы өтеді. Поршеньге жоғарғы қысымды сұйықты немесе газды берген кезде, ол штангалар қозғалысын жоғары қарай көетруін іске асырады. Штанагалар төменге қарай механикалық жетектегідей ауырлық күштерінің салмағынан төменге қарай қозғалады. Пневмо жетек кейбір штеел фирмалармен сораптың ілгегінің аз тереңдігі және аз берілістері бар ұңғымаларда қолданылады. Гидрожетеке кең қоглданыс тапқан.
Сурет 9.5
Сурет 9.5 а, «Викес» фирмасы шығарған қоңдырғылардың сұлбасы және сурет 7.43б. Ресеймен игерліген қоңдырғылар сұлбасы көрсетілген. Жетекті цилиндр 3 поршеньмен бірге ұңғыма фланцында бекітеді. Поршеньге жылтыратылған шток 2 біріктірілген, ол сальник 7 арқылы өтеді. Қоңдырғыда гидрожетек А жүйесі бар, ол сұйықты кезекті түрде цилиндрдің жұмыстың қуысына және теңгеруші аккумулятор 5 береді. Гидрожетектегі теңгеруші жүктелвуін құруға және тұтынатын қуатты азайтуға мүмкіншілік береді. Бұл қоңдырғы құрылысында түрде, барлық қоңдырғылар басқару жүйесін және жұмыс қысымын бар басты қосқан кезед ұңғының шегендеуші тізбегіндегі фланцтарға бекітілетіндей етіп орындалған.
Штангалар ілгегінің нүктесінде іске асатын күштер. Балансирлі термелмелі-станок штангалар ілгегінің нүктесінде жүктеме былай шартталған.
Тәжірибелік мәндер штангаларға түсетін минималды және максималды жүктемелердің қосындысы болады, олардың мөлшері динамометрия өзгерістерімен немесе есептелу жолымен анықталады. Статикалық жүктеме, штангалардың жоғары қарай жүрісі кезнде максималды мөлшері жоғарыда көрсетлігендей мынадай болады.
Рст = Рсұй + Ршт (9.1)
мұнда, Рсұй – плунжер үстінде болатын сұйықтың аурлық күші, Ршт – сұйқытың штангыларының салмағы. Есептеуді жеңілдету үшін қораптың түсу тереңдігін динамикалық деңгейге тең деп аламыз.
Рст = qсұй + qштLBy (9.2)
мұнда, qж – тереңдік сораптың плунжер үстіндегі 1 м сұйық бағансының салмағы, qшт – ауадағы 1 м штангалардыфң салмағы, L – штанглардың ұзындығы, By = 1 - Рж/Ршт (мұнда Рсұй, Ршт – сұйықтың және штанганың материалдарының тығыздығы). Штангалрадың құбырға үйекелу күшін, зерттеулер көрсетіп отырғандай ексермеуге боалды, егер ұңғының қисаюыы 5-6 аспаса. Инерция күштері мына формуламен анықталады:
Рi = M*Imax (9.3)
мұнда, М – қозғалатын бөлшектердің массасы, Imax – штангалар ілгегінің нүктесінің максималды үдеуі. Шығарылатын сұйық еріген және бос газдардың әсерінен сығылатын болғандықтан, онда есептеуде тек штангалардың массасы ескеріледі. М = Ршт/q. Инерция күштерін ескере отырып штанглар ілгішінің нүктесіндегі жүктеме мынадай
Рмах = Р + Ршт*By + Pшт*Sn2/1440 (9.4)
Штангалардың төменге қарай жүрісі кезнде динамикалық жүктеме.
(9.5) Pmin=Pштby
Балансирлі тербелмелі-станокты теңгеру.
Штангалы тереңдік қоңдырғының жетекті қозғалтқышындағы біркелкі жүкте, теңгеруші қоңдырғының бар болған жағдайы кезінде мүмкін. Балансирлі тербелмелі-станоктарда теңгеруші қоңдырғылар кең қолданыс тапқан, олар балансирда және роторда орнтаылған жүктерден құарлған. Теңгеруші қоңдырғы деп қозғалтқышпен жоғары және төмен қарай жүрісі кезінде атқарылатын жұмыстар теңдігін айтамыз, яғани Аж = Ат, Қоңдырғы теңгеріліп тұратындай болатындықтан балансірде орнатылатын жүктің салмағын анықтайық. Ол үшін қарапайым теорияны қолданайық. Жылтыратылған штокта информация күштерінің механикалық жұмысы нолге тең болады, өйткені оны айдаған кезде инерция күштері оң таңбалы болады, ал тежеу кезінде теріс болады. Штангалардаың жоғары қарай қозғалысы кезінде жұмыс. Штангалардың және сұйықтың орын ауыстыруына кетеді.
Аж = (Рсұй + Ршт)*S (9.6)
Төменгі қарай жүрісі кезінде
Ат = - Ршт * S (9.7)
Екі жүріс үшін пайдалы жұмыс
А = Рсұй * S
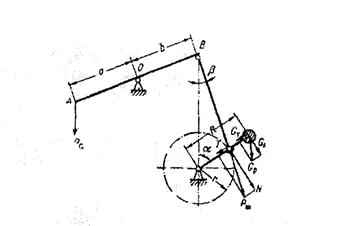
Сурет 9.6
Балансирда В нүктесінде теңгеруші жүкті G орналастырған кезде (сурет 9.6) механикалық жұмыс, жоғары және төмен қарай жүрісі кезінде сәкесінше тең (балансирдің алдынғы иығы артқысына тең деп болжаймыз)
Аж = (Рсұй+Ршт)*S – G*S
Атөм = - Ршт*S + G*S (9.8)
Егер теңгерілген тербелмелі-станок Ажо-Атө тең болса, онда теңдеуді оң жақ бөлігін теңестіргенде, аламыз:
G = Pсұй/2 + Ршт (9.9)
Станок-качалкаларда В нүктесінде жүкті орнатпағандықтан, балансирдің шығының түрлі ұзындығын ескерсек теңгеруші жүктің салмағы мынаан тең:
G = (Рсұй/2 + Ршт)а/с (9.10)
Осы теңгеру әдісі балансирлі деп аталады, ал қарапайым, бірақ оның негізгі кемшілігі болып қосымша инерция күштерінің пайда болуында, ал жүк салмағының G шартталады. Инерциялы күштер қоңдырғының барлық бөлшектеріне теріс әсер етеді.
Сурет 9.7 Бұл кемшілікте тек роторлы теңгеру әдісіне жатады. (сурет 9.7). Теңгеруші күшті Gp кривошипта орнтаады. Штангалардың жоғары және төмен қарай жүрісі кезінде қозғалтқышпен атқарылатын жұмыс мынаған тең болады:
Аж = (Ршт+Рсұй)*S-Gp*2*R
Aт = - Ршт*S + Gp*2*R (9.11)
Теңдеудің оң жақ бөлігін теңестіріп, мынаны аламыз (a=b деп алса):
Gp = (2Ршт+Рсұй) (9.12) Бірақ, S = 2*r, онда Gp = Gp = Ротрлы теңгеру кезінде жүктеудің салмағы тұрақты ол олардың кривошип бойымен оның орын ауыстыруын теңгереді, яғни R радиусты өзгертеді. R мән мына формуламен анықталады:
R = (Ршт+Рсұй/2)*а*r/ (в*Gp) (9.14)
Роторлы теңгеру кезінде жүктердң өзқалыстыдан пайда болатын инерциялы күштер тек кривошипті білік подшипшниктерімен қабылданады және оның тұрақты бұрыштық жылдамдығы кезніде қоңдырғының басқа бөлшектеріне берілмейді.
Сурет 9.8
Үйкеліседі теңгеру кезінде балансирда теңгеретін G жүкті орнатады. (сурет 9.8) Роторда жүктің салмағын келесі түрде анықталады: Штангалардың жоғары және төмен қарай жүрісі кезінде қозғалтқышпен шығындалатын жұмыс, мынаған тең.
Aж = (Ршт+Рсұй)*Sa –G*Sб – Gp*2*R
Ат = - Ршт*Sa + G*Sб + Gp*2*R (9.15)
Жүк G салмағымен бере отырып Gp жүгінің өлшемін анықтайық. Ол үшін теңдеудің оң жақ бөлігін теңестірейік. Онда мынаны аламыз
Gp = (Ршт+Рж/2)*r*a/(R*в) – с*r/(Р*R) (9.16)
Ұйлескен теңгеруі негізінен қуаттылығы орташа тербелмелі-станоктарда қолданылады, онда балансирлі теңгеруді олдану қарама-қарсы салмақтан елеулі инерция күштерінің пайда болуына әкеледі. Қоңдырғының теңгеруін электр қозғлтқыш тоғының мөлшіріне өлшеу арқылы бақылайды, оның максималды мәні, штангалардың жоғары және төмен қарай жүрісі кезінде бірдей болуы қажет.
Негізгі әдебиеттер 1 [§1-§12, бет. 115-195], 2[§1-6, бет. 103-227]. Қосымша әдебиеттер 12 [бет. 53-91]. Бақылау сұрақтары:
1. Штангалы пайдаланудағы кемшіліктер? 2. ШҰСҚ қандай тораптардан тұрады? 3. Жүру ұзындығы қалай өзгереді? 4. Теребелес санын қалай өзгертеміз? 5. Теңестіру не үшін жасалады? 6. Динамометлеу не үшін жасалады? 7. Теңестірдің түрлері 8. Балансирсіз ТС? 9. Құбырлы сораптың артықшылығы? 10. Отырғызылатын сораптың артықшылығы? 11. ШҰСҚ қозғалқышының түрі? 12. Штанганың іліну жүктьесіне әсер етуші күш?
|






 Рш=
Рш= 



 (Pшт + Рсұй/2)*r/R.
(Pшт + Рсұй/2)*r/R. (Pшт + Рсұй/2)*r/R. (9.13)
(Pшт + Рсұй/2)*r/R. (9.13)