| ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса - ваш вокал Игровые автоматы с быстрым выводом Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Вкуснейший "Салат из свеклы с чесноком" Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека - Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
| Особенности структуры БЦВМ 12
1) Формируется разностное уравнение; 2) От разностного уравнения переходят к изображению по Лапласу, выполняя так называемое Z преобразование; 3) На вход такого фильтра подается дискретный сигнал, к которому так же применено Z преобразование; 4) Происходит подавление шумов (как и в аналоговом фильтре); 5) Выполняет обратное Z преобразование (вычисляется оригианал сигнала, который и подается потребителям )
Глава 3 ПРОЕКТИРОВАНИЕ БОРТОВЫХ ИНФОРМАЦИОННЫХ СИСТЕМ Настоящая глава полностью посвящена вопросам проектирования БИС. Вопросы проектирования затрагивают и последующие главы, однако в этой главе они являются центральными. Перед проектировщиком стоят задачи выбора или расчета параметров системы, определения ее внутренней структуры, обеспечения надежности, контролепригодности и других необходимых для авиационной системы качеств. Пути решения перечисленных задач и являются предметом рассмотрения следующих разделов. Бортовая информационная система в общем случае состоит из трех подсистем: подсистемы измерения и преобразования информации, вычислительной подсистемы и подсистемы отображения. Первая из них, подсистема измерения и преобразования, осуществляет прием и измерение аналоговых и дискретных сигналов (от тех систем и датчиков ЛА, которые не имеют собственных средств измерения и преобразования сигналов в цифровую форму), выполняет предварительную обработку этих сигналов, преобразование их в цифровой последовательный код и передачу в таком виде в подсистему обработки для дальнейшего использования. Иногда подсистему измерения и преобразования выделяют в самостоятельную систему преобразования информации (пример такой системы СПАДИ-4 рассмотрен в разделе 5.4). Выбору параметров подсистемы измерения и преобразования информации посвящен раздел 3.1. Вычислительная подсистема осуществляет обработку всей поступающей информации. Эта информация поступает в вычислительную подсистему как непосредственно, так и через подсистему измерения и преобразования. Вычислительная подсистема может быть построена на основе бортовых цифровых вычислительных машин или содержит специализированные вычислители, которые представляют собой те же БЦВМ, но усеченные и приспособленные для выполнения определенных задач. Ниже рассматриваются способы представления информации в БЦВМ (раздел 3.2), состав БЦВМ (раздел 3.3), описываются и сравниваются различные типы вычислительных машин, которые могут быть использованы в БИС (раздел 3.4), рассматриваются способы проектирования систем, содержащих в своем составе БЦВМ или процессоры (раздел 3.5). После обработки вся необходимая информация передается из вычислительной подсистемы в подсистему отображения, задачей последней является представление информации экипажу. Информация может передаваться из подсистемы отображения экипажу в визуальной, звуковой или
МНК Фильтр Калмана
Введение Для решения задачи управления малым космическим аппаратом (МКА) необходимо знать параметры ориентации тела относительно заданной систе- мы координат (СК). В качестве параметров ориентации часто принимают кватернион поворота орбитальной СК в связанную с аппаратом СК и вектор угловой скорости связанной СК относительно инерциальной СК. Знание те- кущих параметров ориентации МКА необходимо не только для задач управ- ления относительно центра масс, но и для задач управления движением цен- тра масс аппарата. Однако вследствие ряда причин параметры ориентации известны с некоторой точностью, и эта ошибка в знании параметров приво- дит к ошибкам в исполнении управляющих воздействий, а, значит, и к ошиб- кам исполнения миссии аппарата. По этой причине задача определения пара- метров ориентации МКА с максимально возможной точностью, или с допус- тимой для задачи управления точностью, имеет большое значение. Параметры ориентации МКА определяются с помощью данных борто- вых датчиков, таких как: датчик солнца, датчик горизонта, звёздный датчик, магнитометр, датчик угловой скорости. Возможно также определение ориен- тации с помощью данных фотометрии – снимков с Земли освещённого солн- цем аппарата. Данные бортовых датчиков можно обрабатывать на Земле и получать параметры ориентации с помощью, например, метода наименьших квадратов. Однако наземная постполётная обработка не подходит для задач активного управления ориентацией, для которых необходимо знание теку- щих параметров ориентации, поэтому для рассматриваемой задачи обработка данных с датчиков производится непосредственно на бортовом компьютере МКА. Причем метод наименьших квадратов нельзя использовать на борто- вом компьютере вследствие больших затрат времени на определение пара- метров и необходимости накопления массива измерений. Поэтому для реше- ния задачи определения параметров ориентации в режиме реального времени часто выбирается фильтр Калмана – рекурсивный метод оценки параметров, использующий для работы математическую модель движения объекта и те- кущий вектор измерений. Фильтр Калмана довольно часто используется на МКА. В качестве примера можно привести португальский микроспутник PoSAT-1, фильтр строится на показаниях солнечного датчика, звёздного датчика и магнито- метра [1]. Для миссии немецкой ABRIXAS был разработан фильтр Калмана, основанный на данных солнечного датчика и магнитометра [2]. Египетский спутник EgyptSat-1 использовал фильтр, основанный только на показаниях магнитометра [3]. Существуют также системы, которые наряду с позицион- ными датчиками используют измерения датчика угловой скорости для полу-
чения оценки параметров ориентации [4]. Однако, несмотря на большую по- пулярность фильтра Калмана как метода оценки параметров ориентации в режиме реального времени, существует ряд серьёзных проблем в его исполь- зовании. Перечислим основные. 1. Проблема задания начальных приближений параметров ориентации. Для эффективной работы фильтра необходимо иметь достаточно хороший начальный вектор состояния. Для определённых начальных условий фильтр может не сойтись. 2. Проблема линеаризации. Фильтр Калмана для своей работы исполь- зует линеаризованную модель движения. При достаточно медленных движе- ниях (или при достаточно частых измерениях) фильтр даёт удовлетворитель- ную оценку вектора состояния. В противном случае фильтр будет давать по- стоянную и растущую ошибку в оценке вектора состояния. 3. Проблема настройки. Фильтр использует в свой работе ковариаци- онные матрицы ошибок, настройка которых сильно влияет на основные ха- рактеристики фильтра: скорость сходимости и ошибка оцениваемого вектора состояния после сходимости. Каждая из этих проблем для каждого конкретного аппарата решается по-своему в зависимости от поставленных задач, поэтому нет общепринятой методики, как работать с фильтром. Первый вопрос, касающийся задания на- чального вектора состояния аппарата, можно решить, например, с помощью локального метода определения параметров ориентации, который даёт до- вольно грубое начальное приближение. Второй вопрос накладывает опреде- лённые ограничения на допустимые движения спутника: в случае необходи- мости достаточно быстрого маневрирования аппарата закладывается воз- можность увеличения частоты опроса датчиков ориентации. Основной, третий, вопрос относительно настройки матриц ковариации, который влияет на точность и сходимость фильтра, в литературе решается в основном двумя путями: 1. Начальные значения матриц ошибок подбираются вручную, методом подбора, путём прогона фильтра в имитирующей программе с выбираемыми элементами матриц (например в [3]). Сложность такого метода заключается в том, что, к примеру, для 6-ти мерного вектора состояния число подбираемых параметров с учетом диагональности матриц составляет 155, и подбор вруч- ную может занимать очень длительное время. Понятно, что подбор парамет- ров вручную не гарантирует нахождения минимума ошибки в оценке пара- метров ориентации. Кроме того, рассматриваемый метод не касается вопроса области сходимости фильтра в случае неточного задания начального при- ближения. 2. Начальные значения матриц ошибок находятся с помощью генетиче- ских алгоритмов (например, в [5]). Генетический алгоритм представляет со- бой автоматизированный прогон фильтра в имитирующей программе, с по- мощью которого путём последовательных малых изменений определяется набор параметров (элементов матриц ковариации), который даёт наилучший результат по определённому критерию (например, точность). Минусом такого алгоритма является то, что он находит локальный минимум по исследуемому функционалу. Кроме того, при большом количестве параметров, полу- чение искомого набора параметров может занять очень много времени. Гене- тический алгоритм также не даёт ответа на вопрос, касающийся области и времени сходимости фильтра. В различных работах, касающихся построения и настройки фильтра Калмана можно найти различные модификации рассмотренных выше мето- дов. Например, в [6] начальные значения матриц находятся вручную, однако число параметров уменьшается до шести. В [7] генетический алгоритм рабо- тал для поиска всего десяти параметров. А в [8] пробовали оба способа и по- лучали разные точности. Однако очень редко в качестве функционала каче- ства фильтра приводят скорость сходимости при плохо заданном начальном векторе состояния, хотя это имеет очень важное значение, так как при опре- делённых условиях фильтр может не сойтись.
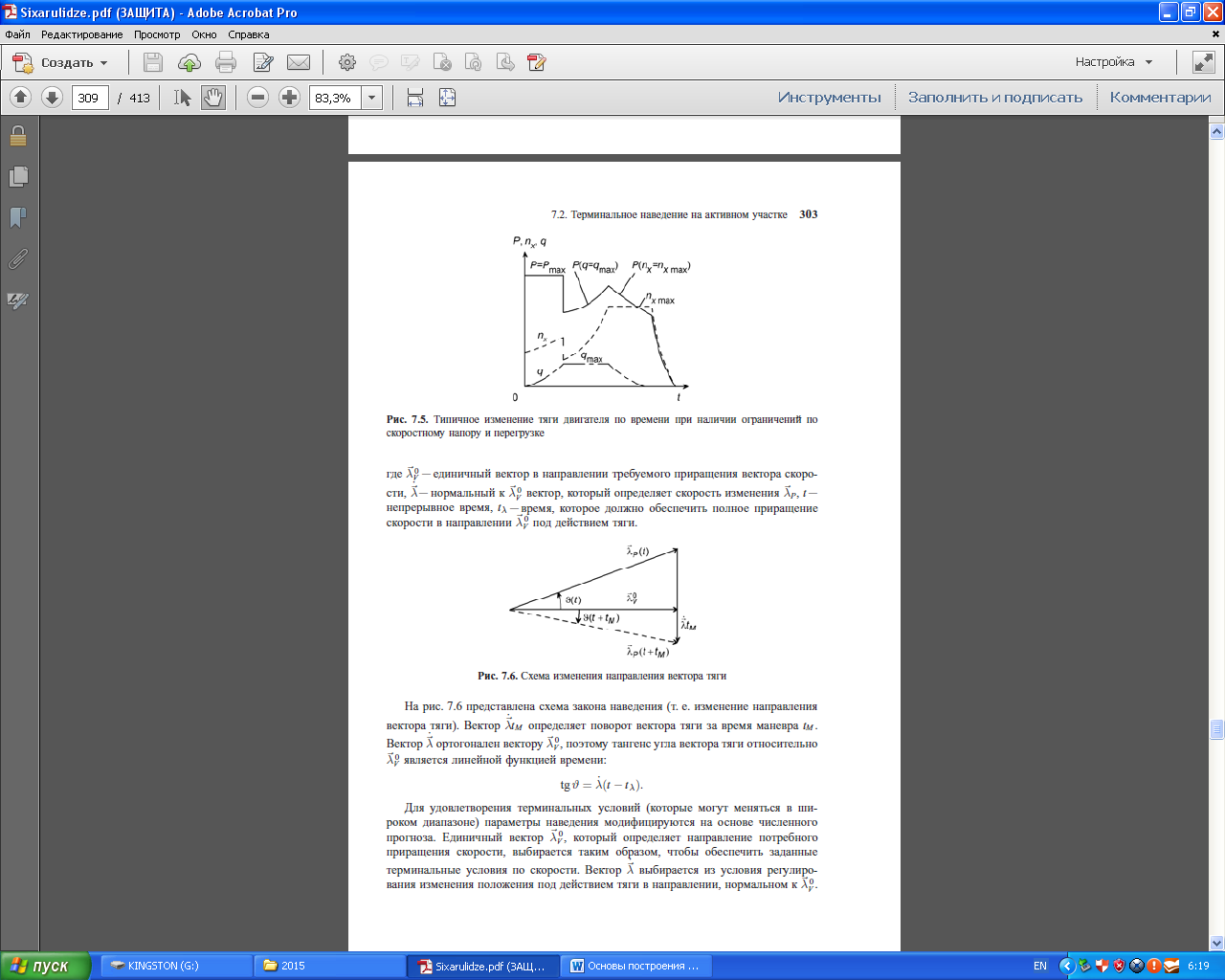
Терминальное наведение
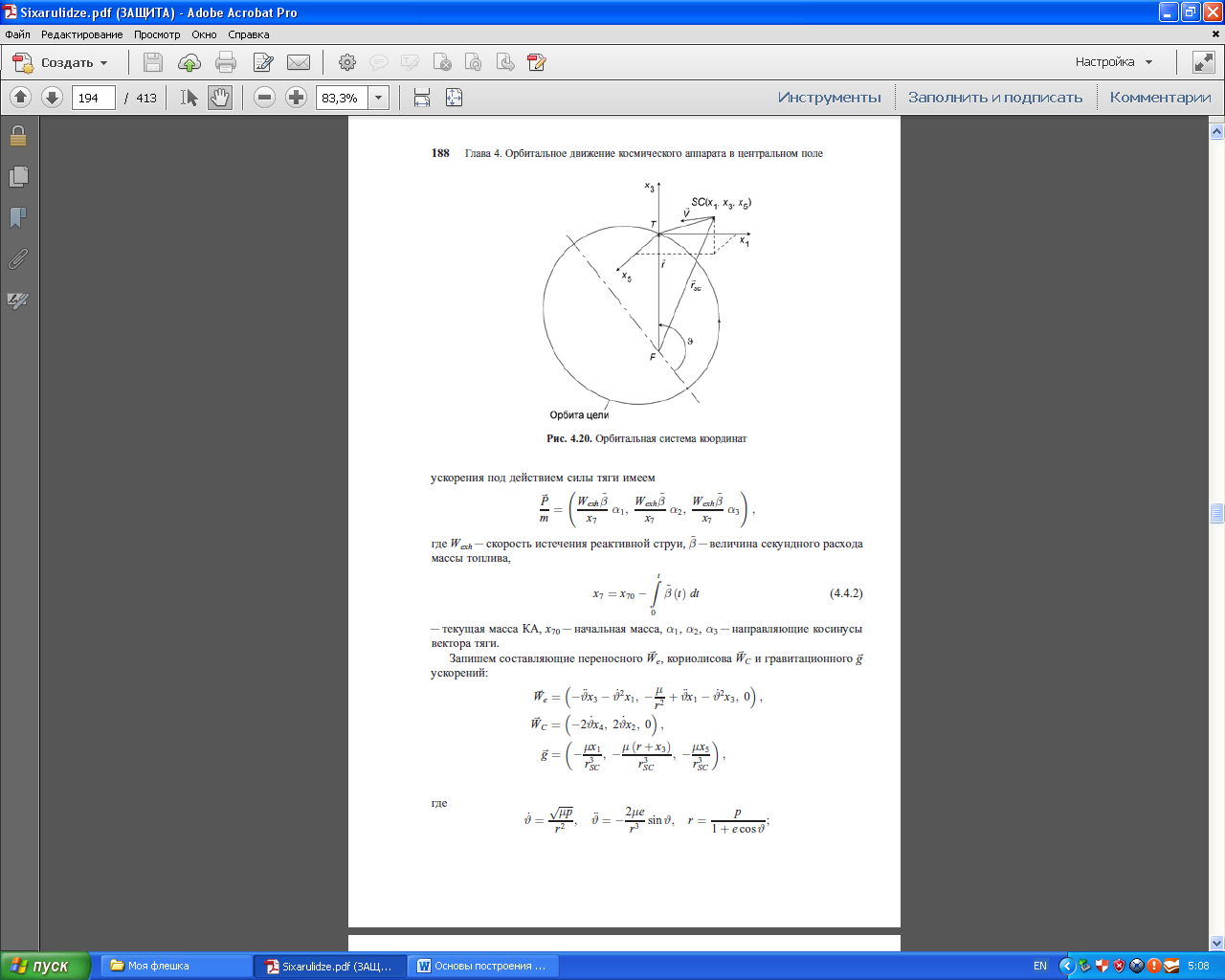
Задача встречи
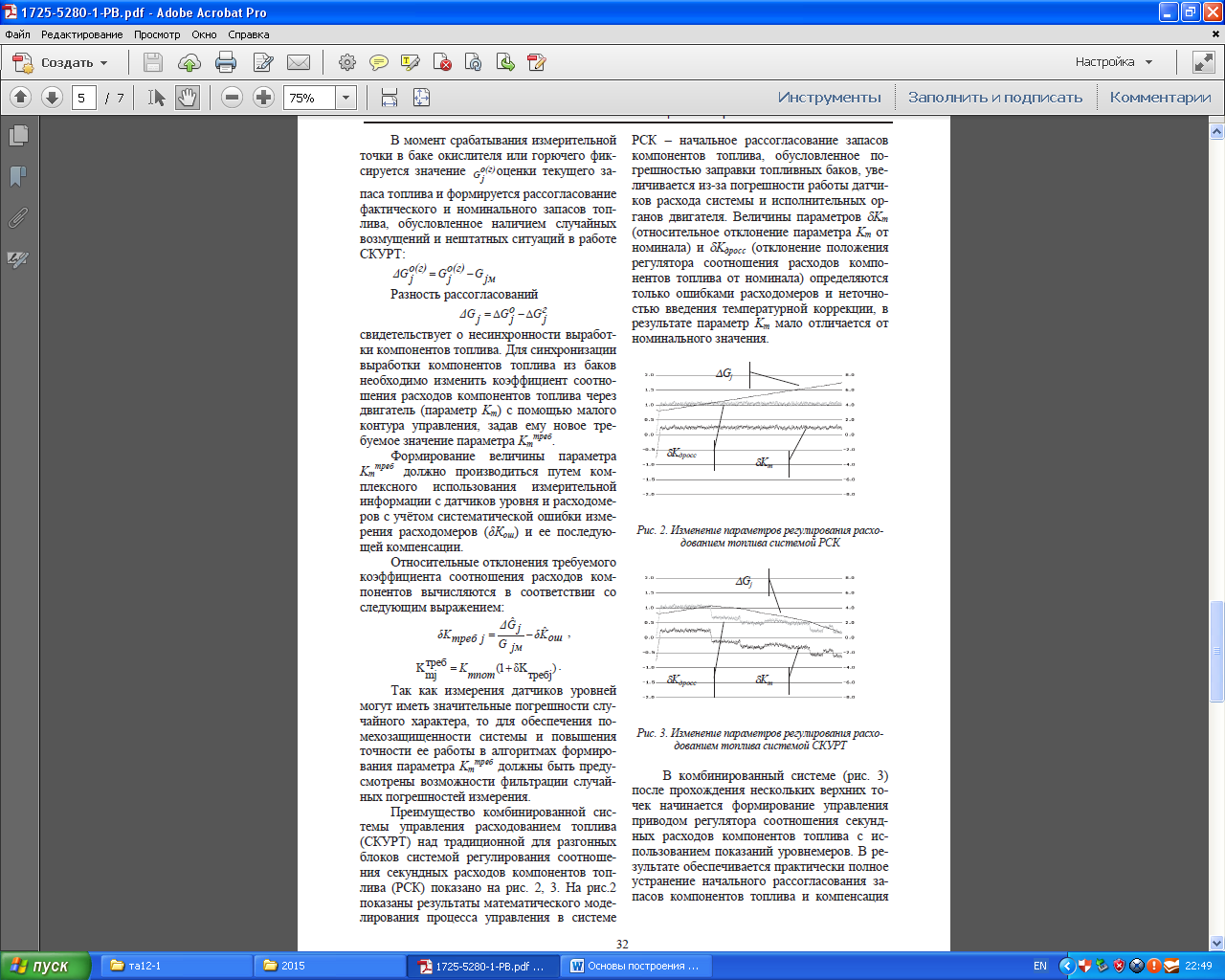
СУРТ
12 |