| ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса - ваш вокал Игровые автоматы с быстрым выводом Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Вкуснейший "Салат из свеклы с чесноком" Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека - Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
| Связь момента силы относительно центра и относительно оси.
Лекция 6 Пространственная произвольная система сил - силы не лежат в одной плоскости и их линии действия не пересекаются в одной точке. Для рассмотрения такой системы сил необходимо ввести новые понятия: 1. Момент силы относительно центра в пространстве. 2. Момент силы относительно оси. 3. Момент пары сил в пространстве.
По определению векторного произведения вектор момента силы направлен перпендикулярно плоскости, проведенной через центр и силу, в ту сторону, откуда поворот радиуса-вектора к вектору силы виден против хода часовой стрелки на наименьший угол. Модуль вектора момента силы относительно центра равен:
Момент силы относительно оси численно равен удвоенной площади треугольника
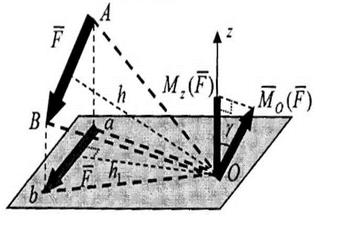
Связь момента силы относительно центра и относительно оси. Модуль вектора момента силы относительно центра, лежащего на оси z, равен удвоенной площади треугольника ОАВ: Момент силы относительно оси z, равен удвоенной площади треугольника
Теоремы о парах: (теоремы приводятся без доказательств) О переносе пары сил в плоскость, параллельную плоскости ее действия - Пару сил можно перенести в любую плоскость, параллельную плоскости ее действия. Кинематическое состояние тела не изменится. Об эквивалентности пар сил - Пару сил можно заменить другой парой сил, если их моменты геометрически (векторно) равны. Кинематическое состояние тела не изменится. О сложении пар сил на плоскости - Систему пар сил на плоскости можно заменить одной парой, момент которой равен геометрической (векторной) сумме моментов исходных пар. Кинематическое состояние тела не изменится. Условие равновесия системы пар сил - Далее будем по-прежнему придерживаться общего плана исследования системы сил, последовательно решая три вопроса: 1. Как упростить систему? 2. Каков простейший вид системы? 3. Каковы условия равновесия системы? Приведение плоской произвольной системы сил к заданному центру - выбираем произвольную точку на плоскости и каждую из сил переносим по методу Пуансо в эту точку.
Вместо исходной произвольной системы получим сходящуюся систему сил и систему пар. В отличие от ранее рассмотренной плоской произвольной системы сил теперь при использовании метода Пуансо присоединенные пары сил характеризуются векторами. Сходящиеся система сил приводится к одной силе, приложенной в центре приведения ( Система пар приводится к одной паре, момент которой равен векторной сумме моментов исходных сил относительно центра приведения ( В общем случае плоская произвольная система сил приводится к одной силе, называемой главным вектором и к паре с моментом, равным главному моменту всех сил системы относительно центра приведения:
|



 Момент силы относительно центра в пространстве - векторная величина, равная векторному произведению радиуса-вектора, проведенного из центра к точке приложения силы, и вектора силы.
Момент силы относительно центра в пространстве - векторная величина, равная векторному произведению радиуса-вектора, проведенного из центра к точке приложения силы, и вектора силы. 
 . Модуль вектора момента силы относительно центра численно равен удвоенной площади треугольника
. Модуль вектора момента силы относительно центра численно равен удвоенной площади треугольника  .
. Момент силы относительно оси - алгебраическая величина, равная произведению проекции вектора силы на плоскость, перпендикулярную оси, на плечо этой проекции относительно точки пересечения оси с плоскостью, взятая со знаком + (плюс), если вращение плоскости под действием силы представляется при взгляде навстречу оси происходящим против часовой стрелки, и со знаком - (минус) в противном случае
Момент силы относительно оси - алгебраическая величина, равная произведению проекции вектора силы на плоскость, перпендикулярную оси, на плечо этой проекции относительно точки пересечения оси с плоскостью, взятая со знаком + (плюс), если вращение плоскости под действием силы представляется при взгляде навстречу оси происходящим против часовой стрелки, и со знаком - (минус) в противном случае  .
. .
.

 . Треугольник
. Треугольник  , где
, где  - двугранный угол между плоскостями треугольников. Поскольку вектор момента силы относительно точки перпендикулярен плоскости треугольника ОАВ, то угол между вектором и осью равен углу
- двугранный угол между плоскостями треугольников. Поскольку вектор момента силы относительно точки перпендикулярен плоскости треугольника ОАВ, то угол между вектором и осью равен углу 
 Момент пары сил в пространстве - вектор, перпендикулярный плоскости действия пары, направленный в ту сторону, откуда вращение плоскости под действием пары представляется происходящим против часовой стрелки. Модуль вектора момента пары равен произведению одной из сил пары на плечо пары:
Момент пары сил в пространстве - вектор, перпендикулярный плоскости действия пары, направленный в ту сторону, откуда вращение плоскости под действием пары представляется происходящим против часовой стрелки. Модуль вектора момента пары равен произведению одной из сил пары на плечо пары:

 ).
). ).
). , где
, где  - главный вектор;
- главный вектор;  -главный момент.
-главный момент.