| ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса - ваш вокал Игровые автоматы с быстрым выводом Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Вкуснейший "Салат из свеклы с чесноком" Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека - Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
| Проверка двигателя на перегрузочную способность 12
ГБОУ ВПО «Сургутский государственный университет Ханты-Мансийского автономного округа – Югры»
Политехнический институт Кафедра автоматики и компьютерных систем
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовому проекту по дисциплине «Локальные системы управления»
Тема: «Проектирование и расчет следящей системы» Вариант №16
Выполнил: студент группы 12-01 Отченаш А.В. Подпись студента _____________
Проверил: ст.пр. Паук Е.Н. Дата принятия отчёта _____________ Оценка _____________ Подпись преподавателя _____________
Сургут
Оглавление Введение. 5 1. Выбор основных элементов системы. 6 1.1. Расчет мощности и выбор исполнительного двигателя, способного развивать момент, превышающий момент нагрузки. Вывод передаточной функции двигателя. 6 1.2. Определение оптимального и реального передаточного числа редуктора. Вывод передаточной функции редуктора. 7 1.3. Выбор и расчет измерителя рассогласования следящей системы. Вывод передаточной функции ИР. 8 1.4. Расчет синхронизирующего устройства при двухотсчетной системе измерения угла рассогласования. Вывод передаточной функции СУ. 9 1.5. Расчет требуемого коэффициента усиления усилителя следящей системы. Определение добротности следящей системы. Вывод передаточной функции усилителя. 10 1.5.1. Расчет коэффициента усиления усилителя по статической ошибке. 10 1.5.2. Расчет коэффициента усиления усилителя по скоростной ошибке. 11 1.6. Выбор преобразовательных элементов (модулятора/демодулятора). 11 2. Составление структурной схемы разрабатываемой следящей системы. Вывод передаточных функций. Описание принципа действия следящей системы. 11 2.1. Составление структурной схемы. 11 2.3. Описание принципа действия следящей системы. 12 3. Проверка системы на устойчивость. 13 3.1. Корневой метод. 13 3.2. Критерий устойчивости Найквиста. 14 3.3. Критерий устойчивости Михайлова. 15 4. Построение частотных характеристик и характеристики переходного процесса. Определение и анализ показателей качества системы. Определение необходимости коррекции. 16 4.1. Построение частотных характеристик. 16 4.2. Построение переходного процесса. 18 5. Выбор способа коррекции следящей системы, синтез корректирующих устройств. 19 5.1. Построение ЛАЧХ исходной системы. 19 5.2. Построение ЛАЧХ желаемой системы. 19 5.3. Построение ЛАЧХ корректирующего устройства. 20 6. Расчет и анализ показателей качества скорректированной системы. 23 6.1. Получение передаточных функций. 23 6.2. Построение переходного процесса. 25 6.3. Построение частотных характеристик следящей системы. 26 Заключение. 28 Использованная литература. 29
Введение Цель работы – проектирование следящей системы воспроизведения угла, которая удовлетворяет заданным техническим условиям. Конструктивно курсовая работа выполнена на 29 страницах и состоит из следующих этапов: 1. Выбор основных элементов. А именно, исполнительного двигателя, редуктора, измерителя рассогласования, усилителя, синхронизирующего устройства и, по необходимости, модулятора или демодулятора. 2. Составление структурной схемы следящей системы. Структурная схема показывает основные функциональные части изделия и их взаимосвязи. 3. Проверка спроектированной системы на устойчивость. То есть, при выведении внешним воздействием системы из состояния покоя, она должна возвращаться в исходное состояние при прекращении внешнего воздействия. 4. Определение показателей качества системы. Данный раздел предполагает проверку по частотным характеристикам и по характеристике переходного процесса. При неудовлетворительных показателях, определить способ коррекции. 5. Коррекция следящей системы. Здесь будет представлена коррекция по колебательности. А так же синтез корректирующего устройства. 6. Расчет и анализ показателей качества скорректированной системы. Вывод передаточных функций, построение частотных и переходной характеристик. Система слежения такого типа широко используется для дистанционного регулирования разными механизмами, а также при построении автоматических систем регулирования в разных отраслях промышленности.
1. Выбор основных элементов системы. 1.1. Расчет мощности и выбор исполнительного двигателя, способного развивать момент, превышающий момент нагрузки. Вывод передаточной функции двигателя. Расчет требуемой от двигателя мощности:
Допустимая мощность двигателя находится в пределах Этим требованиям удовлетворяет исполнительный электродвигатель постоянного тока СЛ-321 со следующими параметрами:
Рис.1. Основные технические параметры двигателей постоянного тока серии СЛ
Выпишем основные параметры двигателя: Мощность: Напряжение питания: Ток якоря: Скорость вращения: Вращающий момент номинальный: Момент инерции двигателя: При отсутствии данных по сопротивлению якорной цепи величина
Передаточная функция двигателя в общем случае имеет вид:
Постоянная времени двигателя:
Коэффициент момента:
Коэффициент противо-ЭДС:
Коэффициент передачи двигателя:
Таким образом, передаточная функция выбранного двигателя будет выглядеть следующим образом:
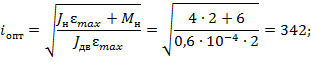
1.2. Определение оптимального и реального передаточного числа редуктора. Вывод передаточной функции редуктора. Расчет оптимального числа редуктора:
Расчет реального числа редуктора:
Найдем отношение реального числа редуктора к оптимальному:
Передаточная функция редуктора тогда будет иметь следующий вид:
Проверка двигателя на перегрузочную способность Рассчитаем момент, требуемый от двигателя:
Двигатель подходит по перегрузочной способности, т.к. величина 1.3. Выбор и расчет измерителя рассогласования следящей системы. Вывод передаточной функции ИР. Измеритель рассогласования рассчитывается на основе статической ошибки:
По этому показателю выбирается измеритель рассогласования на вращающихся трансформаторах ВТ100, поскольку его погрешность следования канала точного отсчета равняется Основные параметры ВТ100: Электрическая редукция канала точного отсчета: Погрешность следования канала точного отсчета: Погрешность следования канала грубого отсчета: Крутизна канала точного отсчета: Крутизна канала грубого отсчета: Максимальное выходное напряжение канала точного отсчета: Максимальное выходное напряжение канала грубого отсчета: Передаточная функция ИР:
1.4. Расчет синхронизирующего устройства при двухотсчетной системе измерения угла рассогласования. Вывод передаточной функции СУ. Схема синхронизирующего устройства имеет следующий вид:
Рис.2. Синхронизирующее устройство Рассчитаем параметры элементов схемы:
Вольтамперная характеристика диодов, используемых в схеме:
Рис.3. ВАХ диода Д226 Определим дифференциальное сопротивление диода:
Добавочное сопротивление:
Передаточная функция синхронизирующего устройства:
Представим в виде таблицы электрические параметры элементов схемы синхронизирующего устройства: Таблица 1. Электрические параметры элементов схемы синхронизирующего устройства
1. 1.1. 1.2. 1.3. 1.4. 1.5. Расчет требуемого коэффициента усиления усилителя следящей системы. Определение добротности следящей системы. Вывод передаточной функции усилителя. 1.5.1. Расчет коэффициента усиления усилителя по статической ошибке.
Где:
1.5. 1.5.1. 1.5.2. Расчет коэффициента усиления усилителя по скоростной ошибке. Коэффициент усиления: Где:
Из полученных значений коэффициентов усиления выбирается значение коэффициента, имеющее наибольшее значение:
1.6. Выбор преобразовательных элементов (модулятора/демодулятора).
Поскольку в системе используется двигатель постоянного тока, то в конечную схему необходимо ввести дополнительное устройство — демодулятор. Демодулятор служит для преобразования переменного тока в постоянный, а его передаточная функция имеет следующий вид:
2. Составление структурной схемы разрабатываемой следящей системы. Вывод передаточных функций. Описание принципа действия следящей системы.
2.1. Составление структурной схемы. Структурная схема содержит все функционально необходимые элементы (исполнительный двигатель с редуктором, измеритель рассогласования, усилитель, синхронизирующее устройство, демодулятор), выбранные при статическом расчете и выглядит следующим образом: Рис.4. Структурная схема следящей системы 1. 2. 2.1. 2.2. Вывод передаточных функций. Таблица 2. Перечень устройств системы
Передаточная функция разомкнутой системы:
Передаточная функция замкнутой системы:
2.3. Описание принципа действия следящей системы. Следящая система предназначена для поворота некоторой исполнительной оси на угол, задаваемый командной осью. Работа системы начинается с того, что на вход системы подается желаемый угол поворота. Механический сигнал поступает на измеритель рассогласования (ИР). ИР – устройство, предназначенное для измерения угла поворота задающей и командной осей. На выходе измерителя формируется электрический сигнал, пропорциональный разнице углов между командной и исполнительной осями (ошибка рассогласования). Конструктивно ИР строится на вращающихся трансформаторах (ВТ). ВТ – электрические машины, предназначенные для преобразования механического перемещения в электрический сигнал. Для повышения точности измерения угла рассогласования используется двухотсчетная схема, состоящая из каналов грубого и точного отсчетов. Переключением сигналов с двух каналов занимается Синхронизирующее устройство (СУ). На вход синхронизирующего устройства поступает сигнал переменного тока. СУ работает таким образом, что при малой ошибке используется сигнал точного отсчета ( С синхронизирующего устройства сигнал поступает на усилитель (У), где усиливается по напряжению и мощности. Проектирование усилителя ведется исходя из выбранных измерителя рассогласования и исполнительного двигателя (ИД). Для работы исполнительного двигателя необходим сигнал постоянного тока. А так как с выхода ИР формируется сигнал переменного тока, в схему подключен демодулятор, который эти сигнал и преобразовывает. Сигал постоянного тока с выхода демодулятора поступает на исполнительный двигатель. ИД приводит в движение редуктор (Р), который и должен поворачивать объект регулирования. Угол, достигнутый на выходе системы, сравнивается с заданным углом на входе. Если они равны, то система работает в режиме слежения и поддерживает заданные настройки. Если углы различаются, то это означает, что в системе присутствует ошибка рассогласования, и начинается корректирование системы.
3. Проверка системы на устойчивость. 3.1. Корневой метод. Запишем характеристическое уравнение системы:
Определим корни:
Система асимптотически устойчива, т.к. все корни характеристического уравнения располагаются в левой части комплексной плоскости.
3.2. Критерий устойчивости Найквиста. Годограф Найквиста строится по передаточной функции разомкнутой системы:
Для построения годографа воспользуемся функцией nyquist() среды MatLab. Получим:
Рис.5. Годограф Найквиста Годограф Найквиста в окрестности точки
Рис.6. Годограф Найквиста в окрестности точки Система устойчива, поскольку годограф Найквиста не охватывает точку с координатами 3.3. Критерий устойчивости Михайлова. Знаменатель передаточной функции замкнутой системы:
Произведем замену
Где:
Построим годограф Михайлова в среде MatLab: >> w=0:.1:800; >> p=-0.052*w.^2+19922.4; >> q=w; >> plot(p,q) >> grid
Рис.7. Годограф Михайлова Из представленного рисунка видно, что годограф Михайлова начинается на действительной положительной полуоси и последовательно проходит против часовой стрелки два квадранта (порядок системы так же равен 4. Построение частотных характеристик и характеристики переходного процесса. Определение и анализ показателей качества системы. Определение необходимости коррекции.
4.1. Построение частотных характеристик. Частотные характеристики строятся по передаточной функции разомкнутой системы. Для их построения воспользуемся функцией margin() среды MatLab:
Рис.8. Частотные характеристики следящей системы Запасы по амплитуде и фазе исследуемой системы соответственно равны:
Для оценки колебательности САР вводят характеристику, которую называют показателем колебательности и определяется она следующим образом:
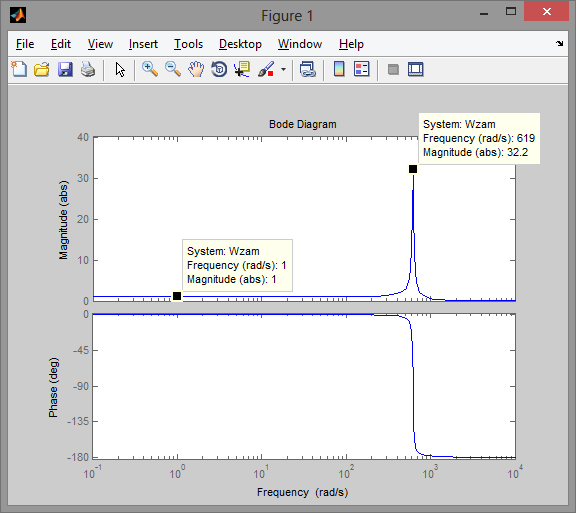
По передаточной функции замкнутой системы построим амплитудно-частотную характеристику. Для построения АЧХ воспользуемся функцией bode() среды MatLab
Рис.9. Амплитудно-частотная характеристика системы
12 |












 может быть приближенно определена из условия равенства постоянных и переменных потерь в номинальном режиме по формуле:
может быть приближенно определена из условия равенства постоянных и переменных потерь в номинальном режиме по формуле:











 , а допустимое значение для двигателя постоянного тока должно быть
, а допустимое значение для двигателя постоянного тока должно быть 

 .
.




























 — приведенный к валу двигателя момент сопротивления нагрузки;
— приведенный к валу двигателя момент сопротивления нагрузки;
 — моментная составляющая статической ошибки системы;
— моментная составляющая статической ошибки системы;
 — коэффициент передачи измерителя рассогласования;
— коэффициент передачи измерителя рассогласования; — коэффициент передачи двигателя по моменту.
— коэффициент передачи двигателя по моменту.


 — добротность системы;
— добротность системы;
 — коэффициент передачи двигателя;
— коэффициент передачи двигателя; — коэффициент передачи редуктора.
— коэффициент передачи редуктора.











 ), а при большой ошибке сигнал с канала грубого отсчета (
), а при большой ошибке сигнал с канала грубого отсчета (  ).
).




 :
:

 . Получим:
. Получим:
 - действительная часть, полученная из членов
- действительная часть, полученная из членов  .
. - мнимая часть, полученная из членов
- мнимая часть, полученная из членов 
 ), что свидетельствует о том, что система устойчива.
), что свидетельствует о том, что система устойчива.