| ПОЗНАВАТЕЛЬНОЕ Сила воли ведет к действию, а позитивные действия формируют позитивное отношение Как определить диапазон голоса - ваш вокал Игровые автоматы с быстрым выводом Как самому избавиться от обидчивости Противоречивые взгляды на качества, присущие мужчинам Вкуснейший "Салат из свеклы с чесноком" Натюрморт и его изобразительные возможности Применение, как принимать мумие? Мумие для волос, лица, при переломах, при кровотечении и т.д. Как научиться брать на себя ответственность Зачем нужны границы в отношениях с детьми? Световозвращающие элементы на детской одежде Как победить свой возраст? Восемь уникальных способов, которые помогут достичь долголетия Классификация ожирения по ИМТ (ВОЗ) Глава 3. Завет мужчины с женщиной
Оси и плоскости тела человека - Тело человека состоит из определенных топографических частей и участков, в которых расположены органы, мышцы, сосуды, нервы и т.д.
| Гальваномагнитные датчики (датчик Холла)
Датчик положения ротора (ДПР) ДПР является элементом позиционной обратной связи. ДПР предназначен для создания сигналов, несущих информацию об относительном положении осей полюсов ротора и осей фаз статорных обмоток двигателя. Для трехфазной обмотки эти углы равны a, a-120, a-240, где угол a определяется текущим положением ротора. Сигнал с ДПР служит для управления подключением тех фаз электродвигателя, которые создадут максимальный момент при взаимодействии с полюсами ротора. Датчик располагается в корпусе электромеханической части двигателя, но схемно связан с коммутатором.
Требования, предъявляемые к ДПР: 1) Простота конструкции, технологичность в изготовлении, надежность в работе. 2) Должен иметь малые размеры. Размеры датчика не должны превосходить размеров щеточно-коллекторного устройства. 3) Потребляемая энергия должна быть малой. Потребляемая мощность не должна превосходить потерь на щетках эквивалентных коллекторных машин. 4) Требования к форме сигнала. Хорошее согласование сигнала датчика с входными цепями инвертора. Большая кратность максимального и минимального выходного сигнала. Большая крутизна нарастания и спада сигнала. Чем в более полной степени выполняется требование 4, тем меньше усложнений придется предусматривать в схеме управления инвертором для обеспечения надежного и экономичного режима переключения ключей. 5) Высокая стойкость к внешним факторам окружающей среды. ДПР должен работать во всем диапазоне воздействий, которым подвергается электродвигатель: температура, свойства среды, вибрация. 6) Помехоустойчивость.
Устройство ДПР ДПР состоит из двух основных элементов: 1) Сигнального (или управляющего) элемента (СЭ). Сигнальный элемент (СЭ) связан с ротором двигателя. 2) Чувствительного элемента (ЧЭ). Чувствительные элементы установлены на неподвижной части машины. Число чувствительных элементов в ДПР обычно равно числу фаз обмотки якоря двигателя. К чувствительным элементам подводится питающее напряжение.
Классификация ДПР. По форме сигнала ДПР делятся на две группы: 1) дискретные; 2) аналоговые. Дискретные ДПР выдают выходной сигнал одного уровня. Он имеет прямоугольную форму (стремятся получить такую) и имеет определенную длительность. Аналоговые ДПР выдают сигнал, величина которого зависит от текущего углового положения ротора. Например, сигнал ДПР может изменяться в зависимости от угла по синусоидальному закону. Также ДПР разделяются на группы по типу чувствительных элементов, преобразующих тот или иной вид энергии в изменение электрического или магнитного параметра. В соответствии с этим признаком выделим три типа ДПР: 1) Фотоэлектрические (также их называют оптоэлектрическими и датчиками оптического типа). 2) Индуктивные. 3) Гальваномагнитные.
Фотоэлектрические датчики Используются в маломощных ВД. Элементами фотодатчика являются: - источник лучистой энергии (светодиод), расположенный на неподвижной части; - приемник лучистой энергии - чувствительный элемент (фотоэлемент: фотодиод, фоторезистор, фототранзистор, фототиристор), расположенный на неподвижной части; - модулятор потока лучистой энергии, расположенный на роторе. Модулирование потока лучистой энергии может быть обеспечено: --- при использовании тонкого диска с отверстиями или прорезями; --- за счет покрытия облучаемой поверхности ротора отражающими и неотражающими излучение материалами. То есть модулятор может работать на просвет, либо на отражение. Число импульсов определяет положение и скорость вращения ротора ВД. Достоинства: 1) Источник лучистой энергии (светодиод) и приемник (фототранзистор) располагаются на неподвижной части. 2) Ротор (якорь) ДПР (в случае исполнения его в виде диска с прорезями) имеет минимальный момент инерции, что является важным при использовании ВД в качестве исполнительного двигателя. 3) Ротор прост по конструкции. 4) Ротор не создает никаких реактивных моментов, что важно для высокоточных приводов. 5) Датчики этого типа позволяют получить достаточно крутой фронт сигнала. 6) Компактность конструкции ДПР в многополюсных двигателях относительно большого диаметра. Это обеспечивается за счет расположения n чувствительных элементов на одной линии по радиусу и применения для каждого ЧЭ своей прорези на экране-якоре. Эти прорези должны иметь угловое смещение относительно друг друга, равное угловому сдвигу чувствительных элементов обычного датчика. Недостатки: 1) невысокий КПД из-за двойного преобразования энергии (электрической в световую и обратно). 2) низкий уровень выходного сигнала. 3) малая чувствительность, обуславливающая необходимость фокусировки луча с помощью оптических линз. 4) слабая помехозащищенность, вынуждающая применять специальные меры устранения размытости фронта сигнала; влияние других источников излучения. 5) ненадежность из-за возможности загрязнения поверхности элементов.
Индуктивные датчики Принцип действия индуктивных датчиков основан на изменении индуктивного сопротивления: xL=wL=wGw2, (9) где w =2πf, L – индуктивность обмотки датчика, G – магнитная проводимость контура замыкания магнитного потока, w – число витков обмотки индуктивного датчика. По виду разделяются на: - дроссельные. - трансформаторные. Рассмотрим один вариант построения дроссельного индуктивного датчика, показывающий принцип действия датчиков такого типа (рис. 7).
Обмотка чувствительного элемента запитывается переменным напряжением повышенной частоты (30-60 кГц), получаемым с выхода вторичного источника питания. Выпрямленный ток обмотки является током управления для тразистора, в цепь которого включена нагрузка. На цепочку коллекторно-эмиттерный переход транзистора – нагрузка подано постоянное напряжение. - постоянные магниты, представляющие собой р секторов якоря ДПР, закрепленного на валу двигателя. Когда магниты находятся от сердечника на удаленном расстоянии, он не насыщен и его обмотка обладает большим индуктивным сопротивлением (9). Ток в цепи практически отсутствует. Транзистор закрыт, выходное напряжение датчика равно нулю. По мере приближения одного из постоянных магнитов по сердечнику дросселя замыкается все больший магнитный поток и сердечник насыщается. Индуктивное сопротивление обмотки существенно снизится, по цепи эмиттер-база пойдет ток и транзистор откроется. Достоинства: 1) высокая надежность, простота и малая стоимость. 2) большая кратность выходного сигнала, что обуславливается прямоугольной петлей гистерезиса ферритов. В зависимости от габаритов дросселя датчики могут выдавать значительный ток (от 10 до 100 мА), что иногда бывает достаточным для управления непосредственно силовым ключом. 3) достаточно крутой фронт сигнала. 4) относительно малые габариты. 5) широкий температурный диапазон и радиационная стойкость. Недостаток: 1) Распределение индукции в зазоре датчика близко к трапецеидальному. Длительность фронта трапеции определяется конструкцией магнитной системы и не может быть очень малой. При положениях ротора, соответствующих фронтам, с выхода датчика снимается не прямоугольное напряжение, а серия импульсов, ширина которых зависит от величины индукции. Это значительно затрудняет выделение огибающей сигнала на входе коммутатора. Указанный недостаток имеет принципиальное значение лишь при весьма малых скоростях вращения, близких к нулю. 2) Другой нежелательный эффект датчиков, работающих на переменном токе высокой частоты, заключается в относительно высоком уровне радиопомех. 3) Необходимость вынесения датчика в отдельный узел в конструкции машины. 4) Использование в схеме коммутатора отдельного высокочастотного генератора для питания датчика. 5) Для микромашин возможны затруднения конструктивного и технологического характера, так как габариты датчика могут оказаться соизмеримыми с габаритами активной части машины. Основным элементом трансформаторных датчиков является трансформатор насыщения. Если магнит удален, сердечник трансформатора не насыщен, имеется трансформаторная магнитная связь между первичной и вторичной обмоткой. На выходе есть сигнал. Если магнит приближен – сердечник трансформатора насыщается, магнитная связь между обмотками трансформатора практически исчезает, на выходе сигнал пропадает. Области применения Индуктивные и трансформаторные датчики переменного тока используются в основном в двигателях большой мощности. В маломощных ВД в основном применяются ДПР постоянного тока, не создающие помех (датчики Холла, магнито- и фотодиоды). Поскольку в большинстве случаев на роторе ВД малой мощности имеется источник магнитного поля – постоянный магнит, оказалось удобным использовать гальваномагнитные ДПР.
Гальваномагнитные датчики (датчик Холла) Гальваномагнитными называются явления, связанные с воздействием магнитного поля на электрические свойства проводников и полупроводников с током. Техническое применение получили три гальваномагнитных явления: 1) Магниторезистивный эффект (эффект Гаусса). 2) Магнитодиодный эффект 3) Эффект Холла. Наибольшее применение нашли гальваномагнитные датчики ЭДС Холла (далее - датчики Холла). Они являются наиболее чувствительными и малогабаритными. Принцип действия датчиков Холла основан на эффекте Холла. Эффект был открыт в 1879 году сотрудником Балтиморского университета Эдвином Холлом. Этот эффект проявляется следующим образом: если пластину из проводникового или полупроводникового материала поместить в магнитное поле с напряженностью Н и пропустить через нее ток, то в ней возникает электрическое поле в направлении, перпендикулярном векторам напряженности и тока. При этом на боковых гранях пластины возникает ЭДС Холла. Если плотность тока постоянна, то эта ЭДС пропорциональна напряженности магнитного поля, т.е. магнитному потоку. Выходной сигнал датчика Холла может быть как аналоговым, так и дискретным. В последнем случае микросхема снабжается пороговым элементом (триггером Шмита). Рассмотрим Датчик Холла, выполненный на микросхеме серии К1116КП с дискретным выходным сигналом. Ее корпус представляет собой небольшую плоскую пластинку (5*5*1,5), которая имеет три вывода: + Uп, Общий, Выход. Питание микросхемы осуществляется через выводы + Uп, Общий. Выходной сигнал снимается с выводов Общий, Выход. Для микросхем данного типа выходной сигнал представляет собой импульсы с уровнем, приблизительно равным напряжению питания. Если микросхема пронизывается в перпендикулярном направлении магнитным потоком, то выходной сигнал зависит от уровня потока.
Уровень индукций срабатывания и отключения в зависимости от марки микросхемы может быть разным. Микросхема Холла является чувствительным элементом датчика положения ротора. Как правило, число микросхем Холла выбирается равным числу фаз. Необходим еще управляющий элемент, который формировал бы магнитный поток изменяющийся в соответствии с положением ротора. Одним из способов формирования такого потока является создание магнитной цепи ДПР, имеющей свой статор (на котором располагаются микросхемы Холла) и свой ротор. На роторе размещаются полюса, число которых строго соответствует числу основных полюсов двигателя. Разумеется, размеры этой магнитной цепи много меньше основной магнитной цепи. Она располагается на том же валу двигателя. Другим способом расположения микросхем Холла является размещение их в пределах магнитной цепи статора и использование в качестве управляющего сигнала рабочего магнитного потока двигателя. Такое техническое решение позволяет убрать с вала двигателя якорь ДПР, что упрощает конструкцию. Особенно важным это является для сверхвысокооборотных двигателей, к роторам которых предъявляются особые требования по габаритам, массе и прочности. благоприятно сказывается на быстродействии и является возможным в силу чувствительности к направлению магнитного поля. Следует заметить, что во всех случаях, когда для получения сигналов ДПР используют поле ротора двигателя, информацию получают не о положении индуктора, а о положении результирующего поля двигателя. В маломощных ВД, в которых реакция якоря проявляется мало, это не ведет к значительным погрешностям. В мощных ВД угол нагрузки может достигать 30-40 эл.град, что приводит к изменению вида механической характеристики (которая, как известно, строится при постоянном угле нагрузки). Достоинства датчиков Холла 1) Малые размеры (собственно микросхемы – до 0,8х0,8х0,1). Благодаря этому микросхемы могут быть встроены в рабочий зазор. 2) Высокая чувствительность к уровню индукции (0,13-0,25Т), чувствительность к направлению магнитного поля. 3) Хорошая помехозащищенность. 4) Достаточно высокая мощность выходного сигнала, обеспечивающая управление микросхемами логики. 5) Безинерционность, отсутствие запаздывания в канале обратной связи по положению ротора. Недостатки: 1) Необходимость логической обработки выходного сигнала ДПР. 2) Необходимость использования многопроводного канала связи: два провода для подвода питания к микросхемам и по одному проводу для информационной электрической цепи от выхода каждой микросхемы. При использовании магнито- и фотодиодов, следует учитывать, что они обладают большим внутренним сопротивлением в открытом состоянии и термонестабильны.
|



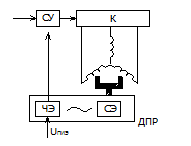 Рис. 6. Составные части ДПР
Рис. 6. Составные части ДПР Рис. 7. Схема индуктивного ДПР
Рис. 7. Схема индуктивного ДПР а)
а) б)
б)