| ПОЗНАВАТЕЛЬНОЕ
| Радиотехнічні методи спостереження супутників
Принцип і апаратура доплеровських вимірювань. Ефект Доплера полягає в зсуві частоти сигналу при русі джерела випромінювання сигналу відносно приймача. Цей зсув отримав назву доплеровського зсуву частоти (ДСЧ), або просто доплеровської частоти
де fд - доплеровская частота; f0 - частота передавача; с швидкість світла у вакуумі; ρ швидкість руху передавача відносно приймального пристрою (названа променевою або радіальною швидкістю). Вираз(4.36) є основною формулою доплеровських вимірювань. У супутниковій геодезії звичайно використовують доплеровські системи з безперервним немодульованим сигналом, оскільки ці системи порівняно прості по конструкції, а безперервний гармонічний сигнал є найкращим для вимірювання радіальної швидкості. Існує три варіанти доплеровських систем. Беззапитні системи. На борту космічного об'єкта знаходиться передавач радіосигналів, що виробляються вісокостабільним генератором частоти. Приймальна наземна станція також має генератор опорних сигналів. Порівняння частот сигналів, що приймається і опорного дозволяє виділити різностну частоту, що залежить від відмінності частот генераторів і від величини ДСЧ. Запитні системи. На відміну від беззапитних в запитних системах використовують лише один (наземний) опорний генератор, а на борту об'єкта вміщують прйомовідповідач, що ретранслює прийняті зі станції сигнали зворотно на Землю. Для розв'язки по частоті приймального і передаючого каналів прйомовідповідача частота сигналів множиться при ретрансляції на деяке число, назване коефіцієнтом ретрансляції. Наземна станція порівнює частоти запитного і відповідного сигналів і вимірює ДСЧ. Системи, працюючі по відображеному від поверхні космічного об'єкта сигналу. У супутниковій геодезії застосовують в основному беззапитні доплеровські системи. Потрібно помітити, що при роботі в беззапитному варіанті пред'являються більш високі, ніж в запитних системах, вимоги до стабільності генераторів, оскільки помилка вимірювання ДСЧ безпосередньо складається при цьому з помилок, викликаних нестабільністю бортового і наземного генераторів. За характером вимірювальної інформації доплеровські приймальні пристрої можна розділити на два види: 1) приймачі, що вимірюють безпосередньо частоту; 2) інтегральні доплеровские приймачі, що вимірюють за досить тривалий інтервал часу (до двох хвилин) число періодів частоти, що приймається, тобто інтеграл частоти. Розглянемо роботу приймального доплеровського пристрою першого типу (рис. 4.10). Сигнали, що виробляються опорним генератором на супутнику частотою f0 посилаються на Землю. Антена наземної станції приймає сигнали з частотою f0 + fд . Після проходження через підсилювач ці сигнали поступають в приймальний пристрій, де змішуються з опорними сигналами частотою fоп, що виробляються високостабільним опорним генератором. Тоді на виході приймального пристрою виділяється корисний сигнал з частотою F =( fоп- f0)- fд. Частота fоп- f0 називається частотою підставки. Ця частота, явно велика доплеровської частоти fд,необхідна для того, щоб частота F, що вимірюється завжди мала позитивні значення. Важливою складовою частиною доплеровських пристроїв є стежачий фільтр з вузькою смугою пропуску, частота настройки якого може мінятися відповідно до зміни частоти F. Следящий фільтр дозволяє підвищити поміхостійкість приймального пристрою, тобто збільшити відношення сигнал/шум на вході вимірника частоти.
Рис. 4.10. Спрощена блок-схема апаратури для вимірювання доплеровської частоти Вимірювальний пристрій являє собою перетворювач частоти в число. Величиною, що безпосередньо вимірюється є число N періодів доплеровського сигналу за певний інтервал часу ΔΤ, який звичайно рівний від 0,5 з до декількох.
Для забезпечення точного часу на станціях використовують кварцові або атомні години. Результати вимірювань поступають в блок реєстрації, де проводиться запис даних на паперову або магнітну стрічку для подальшої обробки. Помітимо, що в сучасних доплеровських системах супутник передає сигнали не на одній, а на двох або трьох когерентних частотах. Це робиться з метою виключити вплив іоносфери на доплеровські вимірювання. Р а д і т е х н і ч н і с и с т е м и і м е т о д и в и м і р ю в а н н я д а л ь н о с т і. Поряд з доплеровськими широко використовуються для геодезичних цілей радіотехнічні системи вимірювання дальності до супутника. До таких систем передусім відноситься геодезична система Секор (Sequential Collation of Ranges - Послідовне зіставлення дальностей). У невеликих масштабах використовується в геодезії комбінована система ГРАРР (Goddard range and range rate - система вимірювання дальності і швидкості її зміни Центру польотів, що пілотуються ім. Годдарда). Геодезична система Секор являє собою запитну радуотехнучну систему, що використовує фазовий принцип вимірювання дальності до супутника. Система почала розроблятися на початку 60-х років для Військово-картографічної служби армії США. Метою створення системи була побудова супутникових континентальних мереж згущення, прив'язка до єдиної світової геодезичної системи віддалених островів, а також отримання даних про фігуру і гравітаційне поле Землі. Бортове обладнання системи було уперше встановлене на супутникові «Анна 1В». Запуск супутників «Секор» ведеться з початку 1964 р. Система складається з чотирьох станцій і супутника з прийомовідповідачем. Три станції вміщуються в пунктах з відомими геодезичними координатами на відстані до 4 тис. км один від одного, четверта в тому пункті, координати якого потрібно визначити. При появі супутника в зоні радіовидимості станцій стеження його прийовідповідач включається за сигналом з однієї із станцій. Відстань від кожної з чотирьох станцій до супутника визначається по вимірюванню зсуву фаз серії модулюючих сигналів частотою 586, 37,2 і 0,3 кГц, що передаються станціями на несучій частоті 420,9 мГц і бортовому прийомовідповідачем, що ретранслюються на когерентних несучих частотах 450 і 225 мГц. Значення різниці фаз між і модулюючими сигналами, що приймаються, і що передаються вимірюються і записуються в двійковому цифровому коді на магнітну стрічку спільно з тимчасовими мітками від високоточних годинників. Робота на чотирьох модулюючих частотах дає можливість вирішити неоднозначність у відстані. Використання двох рознесених несучих частот дозволяє виключити вплив іоносферної рефракції. Для спрощення апаратури супутника всі наземні станції працюють на одній несучій частоті, а для виключення взаємних перешкод вимірювання дальностей супутника виконується послідовно. Повний цикл вимірювань з всіх чотирьох станцій триває біля 50 мс. Оскільки цикли вимірювань повторюються з високою частотою, то не складає проблеми обчислення синхронних дальностей на вибрані моменти, представляючи результати вимірювань в функції часу подібно тому, як це робиться при фотографічних спостереженнях. Магнітні стрічки з всіх чотирьох станцій обробляють в обчислювальному центрі, де на ЕОМ отримують значення дальностей і по них обчислюють координати станції, що визначається .
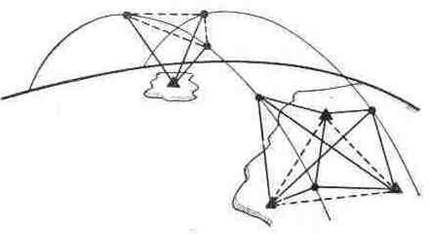
Рис. 4. 12. Метод трисферації
Рис. 4.13. Орбітальний метод. У залежності від взаємного положення стежачих станцій «Секор» можуть бути використані три методи визначення місцеположення четвертою. Геометричний метод, званий методом трисферації (рис. 4.12), застосовується у випадку, коли одна і та ж дільниця орбіти може одночасно спостерігатися всіма чотирма станціями. Одночасне вимірювання дальностей до супутника трьома опорними станціями задає в просторі три сфери, які, перетинаючись, дають дві точки, в одній з яких знаходиться супутник. Для визначення шуканих координат четвертої станції необхідно, щоб положення супутника було визначене, як мінімум, в двох точках при одному проходженні і в одній точці при іншому проходженні супутника. Тоді три сфери з центрами в цих точках і радіусами, рівними виміряним дальностям цих точок від четвертої станції, дадуть положення станції, що визначається. Орбітальний метод застосовують, коли внаслідок географічних умов супутник можна одночасно спостерігати лише з трьох опорних станцій, а з тією, що визначається - через її віддаленість - тільки до або після проходження опорних станцій (рис. 4.13). У цьому випадку орбітальні елементи, визначені по спостереженнях з трьох опорних станцій, екстраполюють на дільницю орбіти, що спостерігається
Рис. 4.14. Метод перетину ліній
з станції, що визначається. Виміряні на цій станції дальності до супутника при двох і більш проходженнях дозволяють визначити шукані координати. Метод перетину ліній є методом синхронних спостережень, який використовують звичайно у разі великої віддаленості деяких станцій один від одного, коли супутник доводиться спостерігати на малих кутах піднесення (рис. 4.14). Знаходження координат станції, що визначається методом трисферації в цьому випадку посилюється визначенням з цих же вимірювань довжин хорд, що з'єднують опорні станції з тією, що визначається. Методика визначення довжин хорд при цьому відрізняється від тієї, що застосовується в радіогеодезичних системах типу Шоран і Хиран, оскільки через ексцентричність орбіти висота супутника над поверхнею Землі може змінюватися. Тому довжину хорди знаходять не по мінімуму суми похилих дальностей до супутника від і опорної станції, що визначається, а по мінімуму суми проекцій похилих дальностей на вибрану поверхню відносності. Для обчислення цих проекцій необхідно знати геоцентричну відстань до супутника і висоти станцій над рівнем моря. Геоцентричну відстань до супутника можна визначити по координатах супутника, що обчисляються в процесі вирішення. Оскільки точність визначення місцеположення підвищується в залежності від кількості надмірних вимірювань і геометрії супутникових проходжень, на практиці використовують більше, ніж два, число проходжень і безліч вимірювань дальності до супутника. Наприклад, стеження супутника чотирма станціями «Секор» тривалістю 7 хв дає біля 29 000 вимірювань. Після того, як координати станції, що визначається отримані із заданою точністю, вона може розглядатися як опорна, тоді одна з чотирьох станцій може бути встановлена в іншому пункті, положення якого треба визначити.
|