| ПОЗНАВАТЕЛЬНОЕ
| Фотографічні методи спостережень
Вступ У теперішній час методи спостережень ШСЗ прийнято ділити на оптичні і радіотехнічні в залежності від діапазону електромагнітних коливань, в якому виконуються вимірювання. Оптичні методи визначення напряму на супутник полягають у вимірюванні зенітної відстані і азимута супутника кінотеодолітами або у визначенні цього напряму в системі координат, що задається зірками, шляхом фотографування супутника на фоні зірок. До оптичних методів відноситься також метод вимірювання дальності супутника лазерними віддалемірами. До радіотехнічних методів спостереження супутників відносяться методи: визначення напряму на супутник короткобазисними радіоінтерферометрами, вимірювання дальності супутника фазовими або імпульсними радіотехнічними системами, і доплеровські, - заснованих на використанні доплеровського ефекту зсуву частоти, що дають інформацію або про радіальну швидкість супутника відносно станції спостереження і її зміну (диференціальні доплеровські методи), або про різницю дальностей до двох положень супутника від станції (інтегральні доплеровські методи). Серед методів, що дозволяють отримати топоцентричний напрям на супутник, методи вимірювання зенітних відстаней і азимутів отримали дуже обмежене застосування по двох основних причинах. По-перше, при таких спостереженнях, навіть якщо врахувати, що вони виконуються при великих кутах піднесення над горизонтом, виникають значні помилки через вплив важковрахованої атмосферної рефракції. По-друге, результати таких спостережень віднесені до місцевої системи координат, пов'язаної, взагалі кажучи, з невідомим напрямом прямовисної лінії в точці спостережень. Це приводить до тих же ускладнень при подальшому їх використанні, які виникають і в класичній геодезії. При використанні короткобазисних радіоінтерферометрів отриманий напрям на супутник характеризується апаратурними помилками порядку декількох секунд. Крім того, отриманий напрям відноситься до системи координат, орієнтування якої залежить від положення приймальних антен інтерферометра і параметрів апаратури. Внаслідок цього виникає необхідність в спеціальному калібруванні, що дозволяє визначити орієнтування системи координат інтерферометра відносно систем координат, що задаються прямовисною лінією або віссю обертання Землі. Оскільки це калібрування можливе тільки при одночасному спостереженні тієї ж візирної мети кінотеодолітом або фотографічною камерою, то цим визначається і теоретична межа точності короткобазисних радіоінтерферометрів, застосування яких при рішенні геодезичних задач було дуже обмеженим навіть на початковому етапі розвитку супутникової геодезії. Опис деяких кінотеодолітів і радіоінтерферометрів можна знайти в книзі І. Меллера. Серед методів визначення напряму найбільший розвиток і широке застосування отримали фотографічні методи спостереження супутника на фоні зірок. Використання координат зірок як опорної системи дає фотографічним методам дві переваги, що полягають в тому, що помилки в остаточному напрямі на супутник через атмосферну рефракцію (але не атмосферної турбуленції) стають величинами другорядними і напрями, що визначаються для всіх станцій незалежно від відстані між ними виходять в загальній системі координат, фотографічні методи були першими, що забезпечили достатню точність рішення геодезичних задач по спостереженнях супутників. Ця обставина, а також порівняно невеликі витрати, необхідні для розробки і створення відповідної апаратури, привели до того, що в теперішній час при спостереженні супутників в геодезичних цілях використовують більш сорока різних типів фотографічних камер. Будучи засновані на одному і тому ж принципі фотографування супутника на фоні зірок, фотографічні методи спостережень можуть значно розрізнюватися в залежності від задачі, що вирішується і об'єкта спостережень і технічних засобів, що використовуються при цьому. Якщо передбачається вирішення чисто геометричних задач, то необхідно виробляти синхронні спостереження супутника з різних точок земної поверхні. При цьому супутник для спостережень вибирають тільки з міркувань оптимальності геометричних побудов, а також отримання максимальної точності спостережень, причому більш переважні яскраві супутники. Якщо мається намір вирішувати задачі, пов'язані з вивченням руху супутника в гравітаційному полі Землі, то спостереження можуть бути і не синхронні, але сам супутник для зменшення негравітаційних обурень в його русі повинен мати невеликі розміри. Тому, якщо не застосовується штучне підсвічування, яскравість такого супутника буде мала і необхідно використати більш складні методи спостережень. Серйозним недоліком фотографічних методів, як і всіх оптичних, є їх повна залежність від погодних умов. Крім того, досить жорсткі, особливо у разі синхронних спостережень, умови видимості, що вимагаються, щоб під час спостережень Сонце було досить низько під горизонтом станції і в той же час освітлювало супутник, значно обмежують періоди можливих спостережень. Ці недоліки впливають не тільки на збільшення часу накопичення достатньої кількості спостережень, але у випадку, коли регулярність і рівномірність розподілу спостережень не менш важливі, ніж точність самих напрямів (наприклад, при вирішенні динамічних задач супутникової геодезії), приводять до зниження точності остаточних результатів. Якщо супутник забезпечити лампою-спалахом, то його можна спостерігати і в тіні Землі, і крім того автоматично забезпечиться синхронність спостережень. Це, однак, вимагає розміщення на супутникові складного обладнання, яке до того ж дозволяє отримати тільки самий необхідний мінімум спалахів. Інша можливість збільшення тривалості спостереження супутників полягає в освітленні супутника з Землі лазером. Перші успішні експерименти по фотографуванню освітленим таким чином супутника були проведені на початку 1965 р. Лазерні засоби вимірювання дальності супутників стали розроблятися порівняно недавно в основному в США, Франції. Лазерні віддалеміри створені в Японії, Австралії, ФРН, Швейцарії; розроблений лазерний віддалемір зусиллями академій наук соціалістичних країн. Перші лазерні імпульси, відображені від супутника, були зареєстровані в кінці 1964 р. відразу ж після запуску першого супутника, обладнаного оптичними кутовими відбивачами. У міжнародних геодезичних експериментах, проведених в 1971 р., брало участь вже десять станцій з різними за характеристикою віддалемірами; ще декілька систем перебувало в стадії розробки. У найближчому майбутньому лазерні системи дозволять провести регулярні спостереження і в денний час. Вплив турбулентності атмосфери, що значно обмежує точність фотографічних спостережень, при лазерних спостереженнях дальності практично незначні. Деякі ускладнення в значенні точності при використанні лазерних систем виникають в зв'язку з тим, що швидкість світла у вакуумі відома в цей час з відносною помилкою порядку 1·10-6. Це вносить найбільшу помилку, що має характер масштабу. Однак, якщо при визначенні одиниці довжини за основу прийняти світлову одиницю, то з цією помилкою можна не рахуватися. Бурхливий розвиток лазерних засобів спостереження супутників пояснюється передусім високою реальністю досягнутою і потенційною точністю вимірювання відстаней при портативності і відносно невеликою вартістю обладнання. Передбачається, що вже найближчим часом вони дозволять визначати взаємне положення віддалених пунктів з помилкою менше за метр. З радіотехнічних методів найбільше використання при вирішенні геодезичних задач отримали диференціальні і інтегральні доплеровські методи і фазові радіотехнічні методи вимірювання дальності. У майбутньому можливе широке використання комбінованих далекомірно-доплеровських систем. Доплеровские методи, що спочатку використовувалися для порівняно грубого стеження за супутниками для визначення їх орбіт, по мірі вдосконалення і підвищення точності вимірювань стали використовуватися при вирішенні навігаційних і геодезичних задач. Важливою перевагою всіх радіотехнічних методів є їх всепогодність і можливість проведення спостережень в будь-який час доби. Точність вирішення геодезичних задач за результатами радіотехнічних спостережень в теперішній час порівнянна з точністю, що досягається при фотографічному спостереженні. Доплерівські методи спостережень супутників в деяких відношеннях навіть значно перевершують фотографічні. Наочною ілюстрацією цього може служити використання доплеровських спостережень для визначення руху полюса. Отримані результати дуже добре узгоджуються з даними Міжнародного бюро часу. Кожний з методів спостережень ШСЗ має свої переваги і недоліки. Зокрема, оптичні методи залежать від погодних умов, а радіотехнічні в значній мірі позбавлені цього недоліку. Фотографічні спостереження дозволяють отримувати взаємне положення пунктів, але без визначення масштабу побудов, і дають можливість з досить високою точністю задати кутове орієнтування геодезичних мереж (для регіональних головним чином азимутальну) в зоряній системі координат. Лазерні і радіотехнічні методи забезпечують визначення взаємних положень точок з високою точністю і незалежний масштаб побудов, але не забезпечують надійної довготної орієнтування цих побудов. Всі методи спостережень дозволяють побудувати системи координат, віднесені до центра маси Землі. Однак для побудови таких систем, а також для вивчення гравітаційного поля Землі, можливості тільки фотографічних спостережень в значній мірі вичерпані. Найбільш перспективними з всіх методів спостереження супутників з Землі в цьому відношенні вважаються лазерні спостереження завдяки їх високій точності. Тому всі методи спостережень не виключають, а взаємно доповнюють один одного. Крім того, при вирішенні геодезичних задач використовують і інші дані, не пов'язані безпосередньо з спостереженнями ШСЗ. Що стосується радіотехнічних методів вимірювання дальності, то з розвитком лазерних систем їх роль, ймовірно, відносно зменшиться.
Фотографічні методи спостережень Принципи визначення власне напряму в супутниковій і класичній фотографічній астрометрії взагалі кажучи співпадають. Для визначення напряму на супутник використовують його зображення на фоні так званих опорних зірок з відомими екваторіальними координатами. Основна особливість і разом з тим основна трудність спостереження супутників, що визначила виділення супутникової астрометрії в окрему гілку фотографічної астрометрії, пов'язана з великими видимими кутовими швидкостями руху супутника. Внаслідок цього виникає необхідність крім напряму отримувати з дуже високою точністю (до 0,1 0,5 мс) момент часу, відповідного зафіксованому на знімку положенню супутника. Жорсткі вимоги до точності реєстрації часу викликають відповідно особливі вимоги до фотографічної апаратури і методів зберігання і реєстрації часу на станціях спостереження супутників. У класичній фотографічній астрометрії використовують оптичні системи з великою фокусною відстанню і малим полем зору. Це забезпечує високу дозволяючу здатність знімка і хорошу якість зображення. Тривалі, до декількох хвилин, експозиції дозволяють в значній мірі зменшити помилки через тремтіння зірок, викликане турбуленцією атмосфери, оскільки на знімку отримують деяке інтегральне зображення у вигляді диска тремтіння. Для фотографування супутників потрібні інструменти з більш широким полем зору, при якому важче забезпечити високу якість зображення. Для отримання на знімку вимірних зображень супутників потрібні дуже короткі експозиції, порядку декількох сотих або тисячних часткою секунди, при яких турбуленція атмосфери стає основним джерелом помилок, лімітуючим точність спостереження супутників. Крім того, необхідно отримати на одному знімку однаково якісні зображення і зірок і супутника, що мають крім великих відносних швидкостей різні яскравостні характеристики. Технічно це здійсненно, однак вимагає різночасності експозиції супутника і зірок і приводить до збільшення помилки за вплив нестабільності атмосфери і самої камери. Всі ці об'єктивні причини роблять задачу визначення напряму на супутник значно більш складною, ніж визначення координат зірок фотографічними методами. Основна особливість супутникових фотографічних камер пов'язана з методом отримання на знімку зображень супутника, що дозволяють виконувати точні вимірювання його координат по відношенню до зображень навколишніх опорних зірок. Якщо яскравість супутника у відображеному світлі Сонця настільки велика, що при своєму русі він устигає залишити помітний безперервний слід на фотоматеріалі, то вимірні його зображення отримують тим або іншим способом кодування сліду. Для спостереження слабих супутників, що не залишають сліду на нерухомому фотоматеріалі, використовується метод стеження. У цьому методі спостереження оптично сформоване зображення супутника втримують деякий час нерухомо відносно фотоматеріалу. Слід супутника як би «стискується» і нагромаджується досить енергії для перевищення порога чутливості фотоматеріалу. Здатність супутникових камер фотографувати супутники без відстеження визначається зоряною величиною супутника, кутовою швидкістю його видимого руху, характеристиками оптичної системи і фотографічного матеріалу, що застосовується. Найбільш могутні супутникові камери, що мають дзеркальні оптичні системи великої світлосили, здатні фотографувати при кутовій швидкості 1° сек-1 супутники до 7-ой зоряної величини. Більшість камер, однак, мають більш слабі оптичні системи і дозволяють фотографувати при тій же кутовій швидкості супутники не слабіше за 3-5 зоряної величини. Режим стеження дозволяє при інших рівних умовах отримати виграш в 4-5 зоряних величин. Можливість фотографування слабих супутників залежить в значній мірі від міри компенсації по величині і напряму швидкості руху супутника відносно фотоматеріалу. Розподіл супутників на яскраві і слабі відносний. Взагалі кажучи, можна віднести супутники не слабіше за 5 зоряних величини до яскравих, але ми надалі, якщо це особливо не буде обумовлено, під яскравими супутниками будемо розуміти ті, які даною конкретною камерою можуть бути сфотографовані без відстеження. Нарешті, точкові зображення супутника на фоні зображень зірок можуть бути отримані, якщо на супутникові є лампа-спалах достатньої потужності або якщо супутник освітлюється з Землі короткими імпульсами могутнього лазера. У залежності від режиму спостереження, що використовується супутникові фотографічні камери діляться на ті, що стежать і нестежачі. Стежачі камери в більшості своїй універсальні і дозволяють виконувати спостереження яскравих супутників кодуванням їх сліду. Для нестежачих за супутниками камер немає єдиної загальноприйнятої зручної назви. Багато з цих камер називають балістичними оскільки прототипами при їх створенні послужили камери, що використовувалися для фотографування запуску ракет при балістичних дослідженнях. Перша камера, призначена спеціально для спостереження супутників, була розроблена в США Д. Бейкером і Д. Нанном (камера отримала назву «Бейкер-Нанн») в 1957 р. Камера відноситься до класу що стежать, але можна спостерігати і яскраві супутники. Довгий час камера була найбільш точною, і досі залишається по суті єдиною, що дозволяє провести точні регулярні спостереження супутників 10-12-зоряної величини. Пізніше різні організації США розробили ще декілька камер для фотографування яскравих супутників і штучних спалахів на фоні зірок: Вільд ВС-4, PC-1000, MOTS-40, MOTS-24, PTH-100, РТН-60 і інш. Основні геодезичні результати були отримані по спостереженнях, виконаних камерою Бейкер-Нанн і Вільд ВС-4. Була також розроблена спеціальна геодезична універсальна супутникова камера К-50. При вирішенні задач супутникової геодезії у Франції широко використовують балістичну супутникову камеру IGN Національного географічного інституту. Спеціально для спостережень слабих супутників розроблена стежача камера Антарес. У ФРН розроблено декілька балістичних камер: ВЕ-1, ВЕ-2 і в різних модифікаціях камера ВМК. З створених в Англії камер найбільший інтерес представляє сама велика в світі балістична камера з оригінальною оптичною системою, в якій об'єднані переваги дзеркальної оптичної системи і широкого плоского поля зображення, що створюється за рахунок вирівнюючої фокальну поверхню лінзи, вміщеної безпосередньо перед фотоматеріалом. Розробці апаратури для спостереження супутників приділяється увага в Японії, Нідерландах, Польщі, Чехословаччині. З розроблених в Німеччині найбільш цікава камера Потсдамського геодезичного інституту з фокусною відстанню 100 см для спостереження яскравих і велика супутникова камера SBG для спостереження слабих супутників. У СРСР для фотографічних спостережень яскравих супутників спочатку широко застосовувалися модифіковані нічні аерофотоапарати (НАФА) з фокусною відстанню 25, 50 і 75 см, забезпечені міжлінзовими центральними затворами імпульсної дії. Після модернізації камери отримали назву УФИСЗ. Тривалі спостереження показали, що точність цих камер 3- 6" у напрямі і 2 3 мс за часом і вона недостатня для вирішення геодезичних задач. Крім них було створено ще декілька камер, в тому числі камера Панайотова для спостереження слабих супутників, в якій зміщення зображення супутника в фокальной площині компенсувалося переміщенням фотоматеріалу. Однак жодна з цих камер не забезпечувала отримання напрямів і моментів часу з необхідною точністю. Прогрес в підвищенні точності і проникаючої сили намітився з моменту створення М. К. Абеле і К. К. Лапушкой стежачої камери ТАФО-АЛ-75, яка послужила прототипом розробленої ними ж в 1965 р. камери АФУ-75. Камера АФУ-75 є універсальною і найбільш точної в СРСР. У 1969 р. вони ж створили камеру ФАС для фотографування спалахів активних супутників. У тому ж 1969 р. на станції спостереження супутників Астрономічної ради АН СРСР під Звенігородом був змонтований перший примірник Високоточної астрономічної установки (ВАУ), що являє собою найбільший в світі фотографічний супутниковий телескоп для спостереження яскравих і слабих супутників і далеких космічних апаратів. Опис більшості з цих камер можна знайти в оглядах. Відповідно до особливостей спостережень в фотографічних супутникових камерах можна виділити декілька основних функціональних систем: система формування окремих зображень і загальної геометрії зображення, що являє собою власне камеру з її оптичною системою і фотографічним матеріалом, що використовується; система отримання вимірних зображень супутника; система отримання вимірних зображень зірок; система наведення (монтування) камери; система зберігання і реєстрації часу. Це розділення в якійсь мірі умовне, оскільки функції різних систем можуть перекриватися. Крім того, в деяких камерах окремі вузли можуть виконувати одночасно функції різних систем. Так, наприклад, монтування камери з приводами може служити для отримання вимірних зображень зірок, а в стежачих камерах і супутника. Система отримання вимірних зображень супутника і зірок одночасно виконують також ряд функцій системи реєстрації часу. При спостереженні супутників користуються різними оптичними системами. Дзеркальна оптика, що дозволяє отримати найбільші вхідні отвори і уникнути аберації, погіршуючої якість зображення, використовується звичайно коли прагнуть добитися найбільшої потужності для спостереження дуже слабих супутників 9 -12-зоряної величини. Однак ці оптичні системи формують зображення на сферичній фокальній поверхні (камери Бий-кер-Нанн, ВАУ, ТА-120) і для того, щоб отримати чіткі зображення, використовують звичайно плівковий фотоматеріал на синтетичній основі, який під час зйомки натягається на шаблон відповідної кривизни. Оскільки при натягненні на шаблон неминучі деформації, то використовують плівку обмеженої ширини, яку для більшої зручності при спостереженнях орієнтують вздовж напряму руху супутника поворотом всієї камери. Коли потрібне поєднання переваг дзеркальної оптики і плоских скляних фотопластин в оптичну систему включають так звану полеспрямовуючу лінзу, що встановлюється безпосередньо перед фотоматеріалом (SBG, ФАС, Велика англійська камера). Введення лінзи дає плоску фокальную поверхню з незначним погіршенням якості зображення. При розрахунку лінзової оптики прагнуть отримати по можливості найбільший вхідний отвір при вибраній фокусній відстані. Основна вимога при цьому - максимальне зменшення коми і хроматичної аберації (в фотографічній зоні спектра) і симетрична по можливості незначна дисторсія. Вибираючи фокусну відстань (від 30 до 120 см) супутникової камери, прагнуть забезпечити високу дозволяючу здатність при необхідній жорсткості системи «об'єктив-фотоматеріал» і достатньої для спостереження супутника рухливості камери. Оптимальна фокусна відстань становить 50 -80 см. Використання великих фокусних відстаней для збільшення точності за рахунок підвищення дозволяючої здатності не приводить до бажаного результату, оскільки чинником, що визначає остаточну точність, стають помилки через нестабільність атмосфери. Як вже говорилося, для визначення напряму на супутник в зоряній системі координат необхідно отримати на одному знімку вимірні зображення супутника і опорних зірок і, крім того, з високою точністю зафіксувати моменти часу отримання цих зображень. Для отримання кодованого сліду супутника, що містить вимірні зображення, застосовують спеціальні прецизіонні затворні системи, що дозволяють одночасно з отриманням зображень фіксувати відповідні моменти часу. Ці затворні системи дуже різноманітні по конструкції і принципу дії. Найбільш тривіальна система, що використовувалася, наприклад, в камерах НАФА, являє собою центральний межлінзовый затвор імпульсної дії, забезпечений контактами для формування електричних імпульсів в моменти відкривання і закриття. Вимірні зображення супутника виходять при коротких експозиціях у вигляді ланцюжка рисок. Моменти подачі імпульсів при відкриванні і закритті затвора реєструються на хронографі і середні з них повинні відповідати серединам довгастих через рух супутника зображень. У затворах такого типу важко забезпечити симетрію процесу відкривання і закриття і середнє з відповідних зафіксованих моментів не обов'язково з достатньою точністю відповідає середині дійсної експозиції. Справа в тому, що фотоматеріал володіє інерційністю і зображення па ньому починає формуватися тільки при певному досить високому рівні освітлення. Цей рівень досягається для супутників різної яскравості при різній мірі відкривання затвора. Отже, момент початку фактичної експозиції може систематично відрізнятися від зареєстрованого моменту, фіксуючого тільки цілком певну фазу роботи затвора. При закінченні експозиції має місце зворотне явище. Якщо процеси відкривання і закриття затвора не симетричні, то при визначенні середнього моменту експозиції залишаються систематичні помилки. Помилка може виникнути також, якщо супутник змінить свій блиск. Тому бажано максимально скоротити тривалість відкривання і закриття затвора, домагаючись при цьому симетричної його роботи. Найбільш широко використовуються так звані обтюраторні затвори безперервної дії. Вони дозволяють отримувати вимірні зображення супутника або у вигляді ряду майже крапкових зображень при серії короткочасних експозицій, або у вигляді коротких розривів в сліді супутника при короткочасних перервах в одній тривалій експозиції. Обтюраторні затвори дуже різноманітні по конструкції. Це може бути система дисків з вирізами, розташованих в міжлінзовому просторі (ВР-4, ВМК) і безперервно обертаючими синхронними двигунами під час спостереження супутника. У камері IGN як обтюраторний затвор використовується дисковий затвор, розташований безпосередньо перед об'єктивом і перекриваючий об'єктив половиною свого діаметра. Диск має секторний виріз, який, проходячи при обертанні перед об'єктивом, визначає тривалість окремої експозиції супутника. Середні моменти експозицій визначаються положеннями дисків затвора, коли об'єктив повністю відкритий, і можуть бути визначені з високою точністю. Недоліком такого типу затворів є те, що тривалість відкривання і закриття сумірна із загальною тривалістю експозиції. Зображення супутника виходить декілька розмитим і можливо виникнення систематичних помилок у визначенні моменту експозиції при змінній яскравості супутника. У багатьох камерах обтюраторні затвори являють собою рухомий екран, що частково перекриває поле зору, який розташовують безпосередньо перед фотоматеріалом. Вимірне зображення у вигляді розриву в сліді супутника отримується, якщо екран при своєму русі перериває пучок світла від супутника. Якщо в екрані буде щілина, то в середині розриву з'являється крапкове зображення. Короткочасністю перехідних процесів початку і кінця експозиції досягають більшої чіткості зображення і зменшують можливість виникнення помилок при зміні яскравості супутника. Вимірні зображення зірок на знімку отримують при фотографуванні двояким образом. Коли камера встановлена на монтуванні, що забезпечує відстеження добового обертання небесної сфери, крапкові зображення зірок отримують накопиченням світлової енергії в той же період часу, в який виходить кодований слід супутника. У цьому випадку камера залишається під час спостереження супутника незмінно орієнтованої по відношенню до зірок і положення зображень супутника серед зображень зірок визначає безпосередньо напрям на супутник в тій же системі, в якій дані координати зірок. Коли камера під час спостереження займає незмінне положення по відношенню до Землі, тобто бере участь в добовому обертанні, отримання вимірних зображень на добових слідах зірок виконується подібно кодуванню сліду супутника. Оскільки експонування зірок і супутника виконується різночасно, то через обертання Землі орієнтування камери в зоряній системі координат безперервно змінюється і буде різною при отриманні зображень зірок і кожного окремого зображення супутника. Для того щоб при обчисленні напряму на супутник врахувати цю обставину, фотографування зірок також супроводжується реєстрацією моментів часу. Оскільки ці моменти необхідні тільки для обліку порівняно повільного добового обертання, то їх досить реєструвати з помилкою порядку 3-5 мс відносно моментів отримання зображень супутника. Звичайно для отримання зображень зірок використовують менш точні, але більш зручні для їх фотографування імпульсні затвори. Спостереження слабих супутників виконують відстеженням, яке може бути здійснене або поворотом всієї камери в напрямі руху супутника, або зміщенням фотоматеріалу. Для дуже повільно рухомих супутників камера може відстежувати зірки, а зміщення зображення супутника відносно фотоматеріал може бути компенсоване поворотом плоскопаралельної скляної пластинки за принципом, використаним у відомій місячній камері Марковіца. При достатній яскравості вимірні зображення опорних зірок можуть бути отримані кодуванням їх слідів в процесі стеження за супутником. Кодування слідів зірок в принципі не відрізняється від кодування сліду яскравого супутника і також повинно супроводитися точною реєстрацією моментів часу. У цьому випадку ми маємо процес спостережень, в певному значенні зворотний спостереженню яскравого супутника при відстеженні опорних зірок, з тією лише, але дуже істотною різницею, що точне відстеження супутника при великих і швидкоміняючих топоцентричних кутових швидкостях представляється задачею набагато більш складною. Якщо опорні зірки слабі і немає можливості отримати їх кодовані сліди, то звичайно використовують метод поперемінного стеження за супутником і зірками, зображення яких виходять на одному і тому ж знімку. Це найбільш складний метод спостереження, оскільки в цьому випадку для визначення по отриманому знімку напрямок на супутник необхідно враховувати досить складні зміни в орієнтуванні фотографічної системи, що мали місце під час спостережень. У фотографічних камерах, призначених тільки для спостереження яскравих супутників, використовують два основних типи монтування: азимутальну і екваторіальну. Екваторіальне монтування крім наведення камери в певну точку небесної сфери дозволяє досить просто здійснювати відстеження добового обертання. У стежачих і універсальних камерах використовуються ці основні типи монтування, але додатково вводиться ще одна або дві осі. Введення додаткових осей дозволяє орієнтувати камеру по відношенню до напряму видимого руху супутника так, що можна найбільш просто, обертаючи її тільки відносно однієї (орбітальної) осі, супроводжувати супутник, весь час втримуючи його в полі зору, а якщо необхідно, то і виконувати точне його відстеження. Найбільш відповідальною функціональною системою супутникових камер є система зберігання і реєстрації часу, звана службою часу, основним елементом якої служать кварцові годинники. Служба часу забезпечується необхідними приладами для прив'язки до еталонного часу. Потенційна точність фотографічних супутникових камер залежить Від якості оптичної системи, фотографічного матеріалу, що застосовується, методу кодування слідів і характеристик затворного механізму, що використовується. При спостереженні в режимі стеження точність отриманого напряму насамперед визначається точністю компенсації швидкості супутника на всьому інтервалі стеження і, як правило, для повільних більше зручних для спостережень супутників вище, ніж для швидких. Точність визначення напряму, що отримується на різних камерах на яскравий супутник по одному знімку оцінюється середніми квадратичними помилками від 0,5 до 3" і для більшості камер знаходиться в межах 1-2". Точність визначення напряму на супутник, що отримується при його відстеженні, як правило, нижче і оцінюється в середньому помилками 2-4" в залежності від якості зображення. Точність реєстрації моментів в системі часу, що задається часами станції, залежить від принципу роботи і характеристик затворного механізму і пов'язаних з ним систем проходження і реєстрації електричних контрольних сигналів. Для більшості камер ця точність характеризується помилками 0,1-0,5 мс. Остаточна точність визначення моментів часу визначається, крім того, методом прив'язки часів камери до еталонної системи часу. Незавершені методи прив'язки можуть вносити додаткові помилки порядку 1-3 мс.
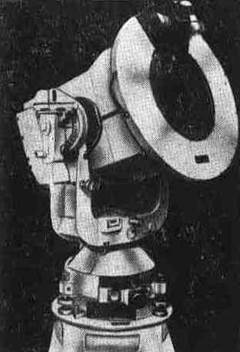
Рис. 4.1. Балістична супутникова камера Вільд ВС-4
Для більш ясного представлення методів фотографічних спостережень нижче приводиться опис декількох камер. Опис камери Бейкер-Нанн не приведений, оскільки він є в численній літературі. Ті ж принципи спостереження використовуються в камері ВАУ. Вона відрізняється від Бейкер-Нанн головним чином екваторіальною трьохосним монтуванням і більшою автоматизацією процесу спостережень. Основні характеристики деяких камер приведені в табл. 4.1. З супутникових балістичних камер найбільшу популярність отримала камера ВР-4 завдяки високій точності отриманих нею результатів спостережень. Камера ВС-4(рис. 4.1) створена на основі камери, що використовувалася при балістичних дослідженнях. Вона має азимутальне монтування (підставка від астрономічного універсала Вільд Т-4). У камері використовують високоякісні лінзові об'єктиви з фокусною відстанню 305 або 450 мм, що покривають при розмірі знімка 18х18 см кутові поля відповідно 33х33° і 24х24°. Фотографування виконують на скляні пластинки товщиною до 10 мм. При спостереженнях і подальшій обробці використовують центральну частину знімка площею біля 400 квадратних градусів. Для кодування сліду супутника використовують міжлінзовий обтюраторний затвор, який при фотографуванні зірок зупиняється у відкритому положенні. Для отримання вимірних зображень на слідах зірок служить допоміжний затвор ірисового типу, виконаний у вигляді насадки на об'єктивну частину камери. Електронна система управління і ретельне виготовлення приводів затвора забезпечує визначення моментів експозицій з помилкою не більше ±за 0,15 мс. Спостереження супутників на камері ВР-4 виконують по наступній схемі. При спостереженнях прагнуть забезпечити повну нерухомість камери. Безпосередньо перед проходженням супутника через центральну робочу зону поля зору допоміжними затворами роблять декілька експозицій зірок різної тривалості (ця операція називається калібруванням камери). Потім дисковим обтюратором кодують слід супутника. Швидкість обертання дисків обтюратора підбирають так, щоб отримати найкращу якість зображення при даній швидкості і яскравості супутника. На одному знімку отримують в середньому біля трьохсот крапкових зображень супутника. Після проходження супутника для контролю незмінності положення камери знову виконують серію експозицій зірок. Тривалість спостереження супутника становить декілька хвилин, протягом яких дуже важко забезпечити повну нерухомість камери. Тому одиничні експозиції зірок іноді виконують і під час проходження супутника, що дозволяє точніше враховувати зміни в положенні камери. Багаторазові експозиції зірок різної тривалості дають можливість вибрати для подальшого використання зображення, найбільш близькі за характеристиками до зображень супутника. Використання ж декількох зображень великого числа зірок і великої кількості точок супутника дозволяє зменшити вплив помилок в положенні кожного окремого зображення на остаточний результат. Камера ФАСпризначена тільки для спостереження активних супутників. Оскільки при цих спостереженнях необхідно лише зафіксувати положення спалахів серед опорних зірок, то камера має виключно просту конструкцію. Камера забезпечена дзеркально-лінзовим об'єктивом з фокусною відстанню 480 мм і діаметром вхідного отвору 250 мм. За рахунок хорошого виправлення всієї аберації (крім дисторсії) оптична камера забезпечує високу якість зображення. Фотографування проводять на скляну пластинку, для чого безпосередньо перед нею вміщують полеспрямовуючу лінзу. Кутові розміри знімка 7х10°, але при обробці використовують тільки обмежені дільниці, в центрі яких зафіксовані зображення спалахів. Під час фотографування спалахів підтримують незмінне орієнтування камери в зоряній системі координат. Для цього всю камеру вміщують на пристрій, що дозволяє нетривалий час (2-3 хв.) відстежувати з достатньою точністю добовий рух зірок, отримуючи їх крапкові зображення, і внаслідок цього відпадає необхідність в реєстрації часу (моменти подачі спалахів вважаються відомими). Цей пристрій отримав назву екваторіальної платформи. Для того щоб на знімку можна було розрізнити зображення спалахів супутника і зірок, після основної експозиції виконують додаткову експозицію зірок з невеликою зміною положення камери. Таким чином, у зірок з'являються додаткові пізнавальні зображення. Супутникова камера АФУ-75(рис. 4.2) заслуговує більш докладного опису, оскільки є основним інструментом, який використовувався для фотографічних спостережень супутників в СРСР і інших соціалістичних країнах. Це універсальна камера, що дозволяє виконувати спостереження супутників різними способами. Фотографування активних супутників проводять так само, як камерою ФАС.
Рис. 4.2. Супутникова фотографічна камера АФУ-75. 1- екваторіальна платформа, 2блок живлення камери, 3 - підставки горизонтальної осі, 4 - рама кріплення орбітальної осі, 5 -рама кріплення четвертої осі, 6 - корпус камери, 7 - об'єктивна частина камери, 8 - телескоп-гід, 9 - блок управління, 10 - касетна частина камери, 11 - привід екваторіальної платформи, I - вертикальна (азимутальна) вісь, II - горизонтальна вісь, III - орбітальна вісь, IV - четверта вісь (вісь широти видимої орбіти), V - оптичні осі телескопа-гіда і камери; К - точка кульмінації супутника, а - апроксимируюче велике коло, b - апроксимируюче мале коло; с - видима орбіта супутника, d-1 - траєкторія (велике коло) відстеження супутника переміщенням фотоматеріалу, β- кут широти видимої орбіти
Фотографування яскравих (до 3 зоряної величини) пасивних супутників виконують кодуванням їх сліду з одночасним відстеженням зірок. Фотографування слабих (до 8 - 9 зоряної величини) пасивних супутників при отриманні одного знімка проводять перемінним відстеженням супутника (переміщенням фотоматеріал) і зірок при нерухомому відносно камери фотоматеріалі. Камера забезпечена семилінзовим об'єктивом «Уран-16» від нічного аерофотоапарата з фокусною відстанню 740 мм і відносним отвором 1:3,5. Дозволяюча здатність в центрі поля зору 30 ліній на 1 мм, при видаленні на 5° від центра вона знижується до 20 ліній. Об'єктив ахроматизований для довжин хвиль 550 і 670 нм; інші оптичні характеристики можна знайти в описі. Об'єктив забезпечений центральним затвором, що служить заслонкою для завдання загальної тривалості зйомки. Для фотографування використовують високочутливу стандартну аероплівку на триацетатній основі, яка під час фотографування притискається до вирівнюючого скла. Розміри знімків, що отримуються 20х14 см (15х11°). У камері АФУ-75 застосоване азимутальне чотирьохосне монтування, яке при спостереженнях забезпечує найбільш зручний спосіб супроводу супутника, дозволяє втримувати його в полі зору камери на всій видимій дузі орбіти. При спостереженнях слабих супутників монтування спільно з телескопом-гідом служить допоміжною системою для узгодження напрямів і швидкості компенсуючого руху фотоматеріалу і переміщення зображення супутника в фокальній площині камери. Дві осі - азимутів (вертикальна) і висот (горизонтальна) - служать для напряму третьої, орбітальної, осі в полюс видимої орбіти супутника. Якщо станція спостереження знаходиться в площині дійсної орбіти супутника (супутник проходить через зеніт станції), то його видима орбіта на небесній сфері буде представляти велике коло. Направивши третю вісь в полюс видимої орбіти і встановивши оптичну вісь камери перпендикулярно до неї, можна втримувати супутник в полі зору поворотом камери відносно орбітальної осі. Якщо станція не лежить в площині орбіти (супутник не проходить через зеніт станції), то напрям «станція - супутник» буде описувати конусоподібну поверхню, слід якої на небесній сфері буде близький до малого кола. Зміною кута між орбітальною і оптичною віссю камери можна і в цьому випадку, зберігши обертання тільки навколо орбітальної осі, добитися хорошого узгодження напрямів руху супутника і оптичної осі камери. Для зміни цього кута в монтування камери введена четверта вісь обертання. Відхилення кута між оптичною і орбітальною осями від прямого, назване кутом широти видимої орбіти, для супутників з висотою до 5000 км може досягати 20°. Для супроводу супутника в межах 120° видимої орбіти по топоцентричній швидкості, що безперервно змінюється камера забезпечена приводами обертання відносно орбітальної осі. Конструктивно це вирішене так, що телескоп-гід і власне камера, маючи загальну вісь обертання, можуть обертатися незалежно. Під час спостереження телескоп-гід безперервно повертається з швидкістю, що автоматично змінюється згідно із законом, близькому до закону зміни топоцентричної кутової швидкості супутника. Зміна швидкості обертання гіда забезпечується зміною частоти генератора, живильного синхронний двигун привода, ця зміна частоти в свою чергу залежить від зміни положення гіда при стеженні за супутником. Камера під час зйомки нерухома; вона повертається тільки в проміжках між фотографуванням відповідно до повороту гіда. Точне узгодження швидкості і напряму супроводу супутника телескопом-гідом, необхідне при спостереженні слабих супутників, досягається вручну невеликою корекцією швидкості обертання гіда і орієнтування камери. Для відстеження добового обертання камера разом з механізмом наведення встановлена на екваторіальну платформу, що забезпечує отримання крапкових зображень зірок. Для кодування слідів яскравих супутників і визначення відповідних моментів служить обтюраторний затвор, вміщений перед плівкою, і спеціальна система реєстрації часу, пов'язана з ним. Обтюратор являє собою дві широких пластини, між якими залишається щілина шириною від 2 до 10 мм, і які по довжині перекривають весь кадр вздовж його найбільшої сторони. При роботі затвора обтюратор описує перед плівкою круговий циліндр, геометрична вісь якого орієнтована вздовж довгої сторони знімка. Під час спостереження яскравих супутників обтюратор обертається синхронним двигуном, який харчується струмом стабільної частоти від кварцових годинників. Обертаючись, обтюратор двічі в секунду перетинає потік світла від об'єктиву. Якщо пластини обтюратора проходять в безпосередній близькості від плівки, то в сліді супутника виходить розрив з крапковим зображенням в середині; при перетині ним світлового потоку вдалині від об'єктиву розрив в сліді виходить без крапкового зображення. Безпосередньо визначити момент перетину щілиною пучок променів від супутника не можна; однак не складає труднощів, знаючи параметри обтюратора, по положенню отриманого крапкового зображення, визначити положення самого обтюратора в момент відповідної експозиції. Якщо додатково зафіксувати ще декілька положень обтюратора, але в суворо певні моменти до і після отримання зображення супутника, то можна шляхом інтерполяції визначити момент експозиції. Камера має спеціальну систему реєстрації моментів експозицій, що використовує цей принцип. Коли щілина обтюратора проходить перед плівкою, на неї по обох сторонах кадру друкується декілька міток, фіксуючих положення щілини. Мітки формуються спеціальною оптичною системою, змонтованою на обтюраторі, що направляє світло від імпульсної лампи на плівку. Спалахи лампи проводяться від суворо певних електричних імпульсів з частотою 100 Гц, що формуються кварцовими годинниками у відомі моменти часу, кратними 0,01с. Використання міток дозволяє отримати в системі часу кварцових годинників камери тисячні і десятитисячні частки секунди. Для визначення моментів експозицій до сотих часткою секунди на знімок друкується зображення дисків фотохронографа, свідчення якого узгодяться заздалегідь з кварцевими годинниками камери. Для зменшення помилок, викликаних неповною синхронністю обертання обтюратора, мітки друкуються при кожному його обороті. Разкид міток через несинхронність складає на знімку 0,2-0,3 мм, що рівноцінно, враховуючи швидкість обертання обтюратора, граничній помилці ±0,2 0,3 мс у визначенні моменту експозицій кожної окремої точки супутника. Крапкові зображення зірок отримуються відстеженням добового обертання. Енергія для отримання зображення нагромаджується в проміжках між експозиціями супутника коли, лопасті обтюратора не перекривають поле зору камери. Схематичний вигляд знімка яскравого супутника, отриманого камерою АФУ-75, показаний на рис. 4.3. Для спостереження слабих супутників камера забезпечена механізмом компенсації, що забезпечує переміщення фотоматеріалу з необхідною швидкістю, який являє собою спеціальну касету, в якій плівка затискається між вирівнюючим склом і притискною плитою. Вирівнююче скло і притискна плита разом із затиснутою між ними плівкою можуть переміщатися вздовж прямолінійних направляючих у великому діапазоні швидкостей спеціальним приводом, працюючим від синхронного двигуна. Цей двигун живиться від того ж генератора змінної частоти, що і синхронний двигун приводу телескопа-гіда. Це забезпечує сувору пропорціональність зміни швидкості руху фотоматеріалу і швидкості обертання гіда. Положення направляючих, конструкція приводів гіда і механізму компенсації вибрані з таким розрахунком, щоб при точному стеженні гіда за супутником по великому колу, яке контролюється візуально, швидкість і напрям руху плівки точно відповідали зміщенню зображення супутника в центрі фокальної поверхні камери. При супроводі супутника по малому колу ця відповідність порушується, оскільки відстеження супутника рухом фотоматеріалу продовжує виконуватися по великому колу. У приводі гіда є варіатор швидкостей, який дозволяє зміною тільки швидкості обертання гіда відновити цю відповідність. У камері АФУ-75 використовується наступний принцип визначення напряму на слабий супутник. Під час зйомки об'єктив камери незмінно орієнтований в зоряній системі координат. Безпосередньо до і після відстеження супутника на нерухомій відносно камери плівці отримують зображення зірок, фіксуючи цим положення системи «об'єктив-плівка» в зоряній системі координат. Якщо при відстеженні супутника його оптичне зображення нерухоме відносно фотографічного матеріалу, то можна віднести отримання фотографічного зображення до будь-якого положення плівки, яке вона займає при компенсаційному русі. Простіше усього, як це і робиться практично, вважати, що зображення супутника отримане в момент, коли плівка займає середнє між експозиціями зірок положення. Напрям на супутник буде відноситися до цього моменту, якщо при обчисленнях використати середні координати зображень зірок, отриманих при обох експозиціях. Для визначення моменту проходження плівки через середнє положення на неї друкуються зображення нерухомої відносно камери мітки. Друкуванням мітки під час експозицій зірок фіксується початок і
п-номер точки супутника і оберту обтюратора
Рис. 4.3. Схематичний вигляд знімка яскравого супутника, отриманого на камері АФУ-75
кінець інтервалу відстеження, що дозволяє визначити середнє положення. Під час руху плівки зображення тієї ж мітки друкується декілька разів у відомі моменти часу. Це дає можливість визначити інтерполюванням невідомий момент проходження плівкою середнього положення. Для визначення моментів друкування мітки одночасно на плівці фіксуються до сотих часткою секунди свідчення фотохронографа. Більш точного відліку свідчення не потрібно, оскільки друкування мітки відбувається в моменти, кратні 0,01 с. Служба часу камери включає кварцові годинники, радіоприймач для прийому радіосигналів і осцилоскоп для прив'язки годин до сигналів часу. Кварцові годинники крім зберігання часу і формування імпульсів для його реєстрації забезпечують камеру стабільною частотою для живлення синхронних двигунів приводів фотохронографа, обтюратора і екваторіальної платформи. Спостереження на камері АФУ-75 виконуються таким чином. Поворотом навколо четвертої осі встановлюють необхідний кут між оптичними осями камери і телескопа-гіда і орбітальною віссю обертання. Поворотом навколо вертикальної і горизонтальної осей орбітальну вісь камери направляють в задаваємий ефемеридами полюс видимої орбіти супутника, апроксиміруємому малим колом. Після цього телескоп-гід, а услід за ним автоматично і камеру, повертають навколо орбітальної осі назустріч руху супутника. При спостереженні слабих супутників додатково встановлюють за допомогою варіатора швидкості необхідне співвідношення швидкості обертання гіда і швидкості переміщення плівки рівному секансу широти видимої орбіти супутника. У такому положенні камера готова для фотографування. При появі супутника в полі зору гіда включають автоматичний супровід. При цьому гід, безперервно обертаючись, слідує за супутником. Сама камера повертається стрибками відповідно до повороту гіда, весь час випереджаючи його на деякий зазделегідь встановлений кут. Оскільки камера під час зйомки нерухома, то величина кута упередження вибирається так, щоб в середній момент фотографування супутник знаходився в середині поля зору камери. Підбираючи швидкість стеження і коректуючи установку камери по азимуту і висоті, домагаються узгодження руху гіда і супутника. При точному узгодженні, коли супутник не зміщається в полі зору гіда, можна фотографувати слабі супутники. Всі операції при фотографуванні виконуються автоматично відповідно до зазделегідь встановленої програми. У залежності від швидкості і яскравості супутника при отриманні одного крапкового зображення використовуються інтервали переміщення плівки, рівні 3, 6, 12 18 або 36 мм, а на знімку виходить відповідно 12, 6, 3, 2 або 1 крапкове зображення. Тривалість експозицій зірок також може змінюватися від 0,5 до 10 с. Після включення камери на зйомку фотографування починається в залежності від вибраного режиму або відразу, або в зазделегідь заданий момент часу. Спочатку плівка нерухома і експонуються зірки. Потім плівка починає компенсаційний рух для експонування супутника. Ці операції виконуються почергово декілька разів. Фотографування закінчується експозицією зірок, коли плівка при своєму переміщенні досягає крайнього положення. При русі на плівку через кожні 1,5 мм друкуються зображення нерухомої мітки і свідчення фотохронографа; коли плівка нерухома, друкується тільки мітка. Таким чином, при інтервалі відстеження, рівному 3 мм, отримують для кожної точки супутника дві мітки часу, що дозволяє визначити середній момент експозиції лінійною інтерполяцією. При великих інтервалах відстеження для кожної точки супутника кількість міток з відомими моментами відповідно збільшується і використовують параболічну інтерполяцію, що враховує нерівномірність руху супутника. Під час спостереження екваторіальна платформа працює безперервно. По закінченні зйомки центральний затвор закривають, рухомий пристрій касети і екваторіальна платформа повертаються в початкові положення, перемотується плівка. Камера обганяє гід на заданий кут попереждения і знову готова до зйомки. Якщо необхідно, то знову корентують напрям і швидкість стеження. Схематичний вигляд знімка слабого супутника, отриманого на камері АФУ-75, показаний на рис. 4.4. При фотографуванні яскравих супутників плівка нерухома. Обтюраторний затвор приводиться у обертання. Фотографування можливо або в довільному, або проміжку часу, що автоматично визначається. У останньому випадку центральний затвор камери при включенні зйомки відкривається в зазделегідь заданий момент часу і закривається через 20-25 с. За декілька секунд до відкривання затвора поворот камери блокується, а телескоп-гід продовжує супроводити супутник. Відкривається затвор і одночасно включається привід екваторіальної платформи. Обтюратор, що обертається кодує слід супутника. При обертанні обтюратора кожну секунду по обох краях знімка друкується біля 10 міток часу так, що мітки, відмінні точно на одну секунду, накладаються один на одну. Одночасно з першою міткою часу на плівку фотографується свідчення фотохронографа, яке відноситься до моменту експозиції першої точки супутника. Приблизно через 25 с затвор закривається; відбувається перемотка плівки. Екваторіальна платформа повертається в початкове положення. Привід орбітальної осі камери деблокується, камера обганяє гід на величину кута попреждения і надалі повертається відповідно до повороту гіда. У цьому положенні камера готова до нової експозиції. Оцінюючи достоїнства камери АФУ-75, необхідно передусім відмітити принцип спостереження яскравих супутників. Спостереження з відстеженням зірок при тривалості зйомки порядку 20 с забезпечують значне зменшення помилок в положенні зображень зірок, викликаних турбуленцією. Хоч експозиції точок супутника і зірок виконуються не суворо одночасно, але короткочасні експозиції супутника рівномірно заповнюють весь інтервал зоряної експозиції. Тому помилки через нестійкість камери і неточність стеження за зірками в середньому будуть мало впливати на результат спостережень. Частково будуть також виключатися і помилки через місцеві зміни рефракції, що спричиняють явище «блукання» зірок. Конструкція обтюраторного затвора забезпечує отримання зображень супутника, ідентичних із зображеннями зірок, і дозволяє уникнути, таким чином, систематичних помилок при вимірюваннях. Принципи реєстрації моментів, що використовуються дозволяють досить просто отримати точність до 0,1 мс в системі часу часів камери при спостереженні яскравих супутників. При спостереженні слабих супутників принципово може бути забезпечена точність реєстрації часу, яка, враховуючи
Рис. 4.4. Схематичний вигляд знімка слабого супутника камерою АФУ-75, отриманого при шестиміліметрових інтервалах компенсуючого зміщення плівки а - зображення нерухомої мітки, отримані при фотографуванні зірок; в - зображення тієї ж мітки і відповідне свідчення фотохронографа, отримані при компенсуючому зміщенні плівки швидкість супутника, повністю відповідає точності визначення напряму. Основний недолік камери складається у використанні не призначеного для точних астрометричний робіт об'єктиву, який має значну кому. Служба часу камери базується на прийомі секундних сигналів часу в основному в короткохвильовому діапазоні. Це приводить до значних помилок при прив'язці годинника до еталонного часу. Нарешті, до недоліків можна віднести і використання плівкового фотоматеріалу, схильного до великих деформацій. |