| ПОЗНАВАТЕЛЬНОЕ
| Последовательные мыши – MS Mouse и PC Mouse.
СОДЕРЖАНИЕ
Лабораторная работа №1 Тема:Интерфейсы устройств ввода информации. Цель работы:Знакомство с видами и характеристиками клавиатуры и мыши, а также интерфейсами, обеспечивающими их взаимодействие с ПК. Теоретические сведения Общие сведения о клавиатурах.Клавиатура является одним из самых первых элементов компьютерных систем. С момента своего появления и до настоящего времени клавиатура претерпела лишь незначительные изменения. Неоднократные попытки радикально улучшить свойства основного устройства алфавитно-цифрового ввода компьютеров пока ни к чему не привели. Мышь также не отменяет многих функций клавиатуры, хотя большинство операций можно выполнять с ее помощью (кроме ввода текста). Однако многие предпочитают использовать в работе с программными продуктами так называемые «горячие клавиши» сочетания алфавитно-цифровых и служебных клавиш, вызывающие определенные действия программы. Как правило, горячие клавиши помогают существенно ускорить работу по сравнению с обычными «мышиными» приемами взаимодействия с интерфейсом программы. К основным параметрам клавиатуры относятся: поддерживаемый интерфейс; механизм клавиш; раскладка символов и служебных клавиш; форм-фактор служебных клавиш; эргономичность; дополнительные атрибуты. Сейчас клавиатуры выпускаются с несколькими вариантами интерфейсов стандартный разъем DIN5, разъем PS/2, интерфейс USB, инфракрасный порт, Bluetooth. Самым современным решением являются клавиатуры с интерфейсом USB. Если клавиатура имеет выходной разъем, то ее можно подключить к компьютеру, а уже к ней подсоединить мышь (естественно, тоже с интерфейсом USB). Механизм клавиш является определяющим фактором, как для срока эксплуатации, так и для субъективной оценки удобства клавиатуры. Сегодня основная масса изделий оснащена либо мембранными, либо механическими либо полумеханическими клавишами. Самое простое устройство имеет мембранный механизм. Формирование сигнала обеспечивается замыканием одинаковых токопроводящих контактов двух гибких мембран, расположенных на некотором расстоянии от клавиш параллельно друг другу и разделенных пластиковой пленкой с отверстиями напротив контактов. При этом возврат клавиши осуществляется за счет куполообразного резинового буфера, на который опирается направляющий штифт. Клавиатуры такого типа обычно называют пленочными. Они наиболее дешевы, но служат недолго. К особенностям этого класса можно отнести хорошую защищенность от замыкания попавшей внутрь жидкостью. Полумеханическая клавиатура отличается от мембранной только исполнением контактного поля. Оно выполнено на печатной плате, более стойко к физическому воздействию и служат дольше мембранных. В качестве механизм возврата так же применяется резиновый буфер.
Рис. 1. Устройство мембранного механизма.
Клавиши могут быть выполнены на механике «с кликом» и без него. В первом случае при срабатывании клавиши слышен отчетливый щелчок и чувствуется некоторое пороговое усилие. Механическое решение здесь довольно простое – под клавишей помещается пластина из пружинистой стали, сопротивляющаяся воздействию усилия нажатия. После определенного хода клавиши она резко, со щелчком, прогибается в обратную сторону. Устройством возврата в механической клавиатуре служит пружина, а контактное поле выполнено на печатной плате. Если контакты в механической клавиатуре позолоченные, она выдерживает около 100 миллионов нажатий, что в пять раз выше; чем у мембранной клавиатуры. Однако обычная механическая клавиатура плохо защищена от попадания на контактное поле жидкости и посторонних частиц. Для защиты требуются специальные меры, которые удорожают продукцию. Обозначения на клавишах бывают нанесенными механическим способом, стойким красителем или наклеенными. Последний вариант иногда применяется для русской раскладки, хотя срок службы не превышает полугода. Форм-фактор служебных клавиш оказывает большое влияние на удобство работы с клавиатурой. К служебным относятся клавиши, которые не предназначены для ввода символов Enter, Backspace, Esc, Tab, Caps Lock, Shift Ctrl, Aft и др. Во многих программных продуктах служебные клавиши широко используются для формирования сочетаний «горячих клавиш». Расположение и форма служебных клавиш иногда значительно отличаются у разных производителей. Многие пользователи предпочитают такой форм-фактор, когда клавиша Enter большая L-образная, а правый Shift укороченный за счет перемещения одной символьной клавиши вправо от него. Под эргономичностью клавиатуры обычно понимают общую субъективную оценку ее удобства в работе. Существуют численные значения некоторых параметров. Например, стандартной величиной нажатия клавиши считается 55 грамм. Если требуется большее усилие, то говорят, что клавиатура «жесткая». Существенно меньшее усилие не позволяет оценить, произошло срабатывание клавиши или нет. Средняя величина хода клавиши до срабатывания принята около 3,5 миллиметров. Для быстрого ввода надо выбирать клавиатуры с более коротким ходом клавиш. В качестве дополнительных устройств часто выступают: встроенный микрофон, а иногда и динамики, сенсорная панель, порт интерфейса PMCIA и даже светодиоды подсветки клавиш. Принцип работы клавиатуры. При наборе символов на клавиатуре каждое нажатие клавиш воспринимает специальная программа – драйвер клавиатуры. Каждая клавиша имеет номер, который определяет её позицию на клавиатуре. Каждое нажатие или отпускание клавиши вызывает прерывание. Программа, обслуживающая это прерывание, читает скан-код (скан-код это однобайтное число, младшие 7 битов которого представляют идентификационный номер, присвоенный каждой клавише) и преобразует его в два байта. Первый байт содержит символьный ASCII код, а второй– позиционный код. Первый байт получается преобразованием позиционного кода клавиши по определённой процедуре в зависимости от состояния клавиш Shift, Alt, Ctrl, Caps Lock и Num Lock, от режима латиница или кириллица и от раскладки клавиатуры в символьный (ASCII) код. Для специальных клавиш, например функциональных или клавиш управления курсором, код ASCII равен нулю. Это позволяет программе различать обычные печатные символы и нажатия других клавиш. Драйвер записывает эти два байта в буфер клавиатуры, который может хранить информацию о 15 нажатий на клавиши. Кроме этого, драйвер отслеживает информацию о состоянии некоторых клавиш, таких как Shift, Alt, Ctrl, Caps Lock, Num Lock, Scroll Lock и др. Имеется два типа кодов символов: коды ASCII и расширенные коды. Коды ASCII – это числа, которые соответствуют расширенному набору кодов ASCII для IBM PC. Для IBM PC этот набор включает обычные символы пишущей машинки, а также ряд специальных букв и символов псевдографики. ASCII–коды включают также 32 управляющих кода, которые обычно используются для передачи команд периферийным устройствам, а не выводятся как символы на экране; однако каждый из них имеет соответствующий символ, который может быть выведен на дисплей, с использованием прямой адресации дисплейной памяти. Строго говоря, только первые 128 символов являются настоящими символами ASCII, так как ASCII – это аббревиатура «Американский стандартный код для обмена информацией». Но программисты обычно говорят о кодах ASCII, чтобы отличить их от других чисел. Например, "ASCII 8" относится к клавише "Backspace", в то время как "8"– это цифра, которой соответствует ASCII 56. Второй набор кодов – расширенные коды присвоен клавишам или комбинациям клавиш, которые не имеют представляющего их символа ASCII, таким как функциональные клавиши или комбинации с клавишей Alt. Расширенные коды имеют длину 2 байта, причем первый байт всегда ASCII 0. Второй байт – номер расширенного кода. Например, код 0:30 представляет Alt-A. Начальный ноль позволяет программе определить, принадлежит ли данный код набору ASCII или расширенному набору. Таким образом, принцип работы клавиатуры заключается в следующем: 1. При нажатии на клавишу (или комбинацию клавиш) специальная микросхема, встроенная в клавиатуру (контроллер клавиатуры), выдает скан-код. 2. Скан-код поступает в микросхему, выполняющую функции порта клавиатуры. 3. Порт выдает процессору прерывание с фиксированным номером (для клавиатуры 9). 4. Процессор обращается по номеру прерывания в оперативную память за адресом программы, обрабатывающей это прерывание. 5. Исполняет эту программу (зашита в ПЗУ). 6. Программа–обработчик определяет, какой код символа соответствует данному скан-коду, и направляет его в буфер клавиатуры (область памяти), затем прекращает работу, известив об этом процессор. 7. Процессор прекращает обработку прерывания и возвращается к отложенной задаче. 8. Введенный символ хранится в буфере клавиатуры до тех пор, пока его не заберет программа, для которой он предназначен. Интерфейсы клавиатуры.Традиционная клавиатура PC представляет собой унифицированное устройство ввода со стандартным разъемом и последовательным интерфейсом связи с системной платой. В настоящее время используются так называемые расширенные (enhanced) клавиатуры AT или PS/2, имеющие более 100 клавиш. Они вытеснили первые 84-клавишные клавиатуры AT и тем более клавиатуры XT. По электрическому интерфейсу клавиатуры XT и AT совпадают, за исключением того, что двунаправленный интерфейс позволяет клавиатуре AT принимать команды от системной платы. Однако по логическому интерфейсу они несовместимы (клавиатура AT иногда имеет переключатель режима XT/AT). Клавиатура PS/2 отличается от AT только исполнением разъема, при необходимости можно использовать переходник. Клавиатуры имеют внутренний микроконтроллер, способный определить факты нажатия и отпускания клавиш, при этом можно нажимать очередную клавишу, даже удерживая несколько ранее нажатых. При нажатии клавиши клавиатура передает идентифицирующий ее скан-код. При удержании клавиши в нажатом положении через некоторое время клавиатура начинает автоповтор передачи скан-кода нажатия этой клавиши. Задержка автоповтора (typematic delay) и скорость автоповтора (typematic rate) для клавиатур AT программируются. Расширенная клавиатура позволяет выбирать 1 из 3 наборов скан-кодов. С распространением шины USB появились клавиатуры и с этим интерфейсом; они имеют и встроенный хаб, например, для подключения мыши USB. Клавиатура USB питается от шины. Для клавиатуры USB требуется специальная поддержка со стороны BIOS; она имеется в современных системных платах. Интерфейс клавиатуры AT и PS/2.Для подключения клавиатуры предназначен последовательный синхронный двунаправленный интерфейс, состоящий из двух обязательных сигналов KB-Data и KB-Clock. Обе линии на системной плате подтягиваются резисторами к шине +5 V. На обеих сторонах интерфейса выходные сигналы низкого уровня формируются выходами элементов с открытым коллектором (стоком), а состояние линий может быть прочитано через входные линии контроллеров. Вид разъемов (со стороны задней панели) и назначение контактов приведены на рис. 2. Конструктивно возможны два варианта разъема – обычная 5–контактная розетка DIN (клавиатура AT) или малогабаритная розетка mini-DIN (PS/2). На этот же разъем через плавкий предохранитель поступает напряжение питания клавиатуры +5 V. Питание от разъема клавиатуры часто используется такими устройствами, как внешние накопители или адаптеры локальных сетей, подключаемыми к параллельному порту. Плавкий предохранитель, установленный на системной плате, может не выдержать броска тока, потребляемого этими устройствами. При этом откажется работать и клавиатура – ее индикаторы даже и не мигнут при включении.
Рис. 2. Разъемы (вид со стороны контактов) подключения клавиатур: а – AT и б – PS/2 Процессор общается с клавиатурой через контроллер интерфейса клавиатуры – микроконтроллер 8042 или программно-совместимый с ним, установленный на системной плате. Для обмена информацией в основном используется порт 60h, из которого принимаются скан-коды. О необходимости чтения скан-кода контроллер сигнализирует процессору через аппаратное прерывание IRQ1, сигнал которого вырабатывается по каждому событию клавиатуры (нажатию и отпусканию клавиши). Задание параметров автоповтора, выбор таблиц скан-кодов, управление светодиодными индикаторами, а также управление режимом сканирования матрицы клавиш и запуск диагностического теста осуществляется командами, посылаемыми в этот же порт. Контроллер транслирует команды в посылки, направляемые к клавиатуре. Работа двунаправленного интерфейса отображена на рис. 3.
Рис. 3. Временные диаграммы интерфейса клавиатуры: а – прием посылки от клавиатуры; б – передача команды в клавиатуру. В исходном состоянии обе линии «отпущены» выходными формирователями в состояние с высоким уровнем. Клавиатура может начать передачу данных в произвольный момент, когда интерфейс находится в покое. Клавиатура формирует стартовый бит (низкий уровень) на линии KB-Data и первый импульс KB-Clock, что является сигналом контроллеру о необходимости начала приема. После подъема KB-Clock она выводит 0-й бит данных на линию KB-Data, а затем и следующий импульс KB-Clock. Контроллер должен «защелкивать» принятый бит данных по спаду KB-Clock. Так передаются все 8 бит данных и бит паритета, дополняющий число единичных бит до нечетного. После синхроимпульса бита паритета контроллер клавиатуры должен сформировать импульс KB-Clock, подтверждающий прием байта (Ack). Если весь байт с битом паритета не будет получен контроллером за 2 мс, контроллер прекращает прием данного байта и фиксирует ошибку тайм-аута. Обратная передача – вывод команды контроллера в клавиатуру – происходит несколько сложнее (рис. 3, б). Из состояния покоя контроллер устанавливает низкий уровень KB-Clock на 250 мкс и формирует старт-бит (низкий уровень) – это сигнал клавиатуре на прием команды. На него клавиатура должна ответить серией из 11 импульсов KB-Clock. По спаду очередного синхроимпульса контроллер выставляет очередной бит данных, а клавиатура его «защелкивает» по фронту формируемого ею же синхроимпульса. После бита паритета (9-й импульс) и единичного стоп-бита (10-й) на 11-м импульсе клавиатура формирует нулевой бит подтверждения (Ack). После этого контроллер формирует импульс KB-Clock (60 мкс), который является запросом на прием ответа клавиатуры. Контроллер ожидает окончания ответа на этот запрос не долее 20 мс и, если ответ не придет за это время, сформирует ошибку тайм-аута. Ошибка будет также в случае, если клавиатура не введет первый синхроимпульс за 15 мс от начала запроса или контроллер не примет данные, включая стоп-бит, за 2 мс с момента появления синхроимпульса бита 0. На системной плате PC/XT контроллера 8042 не было, а интерфейс клавиатуры (однонаправленный) был реализован аппаратной логикой – регистром сдвига, параллельный выход которого подключается к входам порта А системного интерфейса 18255. По приему байта от клавиатуры вырабатывается аппаратное прерывание IRQ1, обработчик которого может прочитать принятый байт из порта 60h. С помощью бит 7 и 6 порта 61h возможны программная блокировка и сброс клавиатуры соответственно. Сброс клавиатуры XT осуществляется обнулением линии KB-Clock. Системная поддержка и программный интерфейс.Клавиатура имеет системную поддержку на уровне BIOS – обработку фактов нажатия и отпускания клавиш и обеспечение сервисов ввода символов с клавиатуры, а также управления ее параметрами (задержка и частота автоповтора) и индикаторами. Коды, принятые от клавиатуры ее контроллером, считываются и обрабатываются обработчиком аппаратного прерывания IRQ1 (вектор 09h). Результат обработки помещается в клавиатурный буфер, из которого по программному прерыванию Int 16h этот результат для дальнейшей обработки может быть извлечен значительно позже. Нажатие «системной» комбинации Ctrl+Alt+Del, клавиши PrintScreen (SysRq) и некоторых других к записи в клавиатурный буфер не приводит, а вызывает специальные процедуры. Прикладной программе, для которой требуется нестандартное использование клавиатуры (например, в качестве музыкальной), придется самой заниматься обработкой аппаратного прерывания перехватывая вектор Int 09h. Перехват этого вектора требуется и для вызова каких-либо функций резидентных программ по «горячим» клавишам. При начальном тестировании процедура POST инициализирует клавиатуру (и ее контроллер) и запускает диагностический тест. Во время этого теста клавиатура мигнет всеми индикаторами, после чего может остаться включенным только индикатор Num-Lock (зависит от установки в BIOS Setup). В случае обнаружения ошибки клавиатуры на консоль выводится сообщение с возможным указанием скан-кода залипшей клавиши и обычно предлагается нажать клавишу F1 для продолжения. То же самое произойдет, если тест не обнаружит клавиатуру (например, из-за вывалившегося разъема или перегоревшего предохранителя), но в этом случае нажатия клавиши F1 будет уже недостаточно. Ошибку диагностики даст и подключение к компьютеру AT клавиатуры от XT, обратное «скрещивание» тоже неработоспособно. Чтобы начальная загрузка не останавливалась по ошибке (отсутствию) клавиатуры (POST будет дожидаться получения кода клавиши F1), тестирование клавиатуры может быть отменено настройкой CMOS Setup. Для обслуживания клавиатуры используются ячейки ОЗУ из области да BIOS (BIOS Data Area): • 0:0417,0:418 – флаги клавиатуры; • 0:0419 – аккумулятор кода Alt-набора; • 0:041 А – указатель головы буфера (Buffer Head), 2 байта (модифицируются при помещении символа в буфер); • 0:041C – указатель хвоста буфера (Buffer Tail), 2 байта (модифицируется извлечение символа из буфера); • 0:041E-0:042D – область кольцевого буфера (16 слов). Общие сведения об устройствах дистанционного управления курсором.Электронно-механическое устройство дистанционного управления курсором типа Mouse (мышь) получило свое название благодаря отдаленной схожести с хвостатым животным. Принципиальное устройство мыши не отличается особой сложностью и основано на преобразовании вращательного движения па двум осям через оптический или электрический конвертор в серию цифровых импульсов, пропорциональных скорости передвижения. Сегодня популярны мыши с интерфейсами СОМ, PS/2, USB и IrDA. В первом случае мышь подключают к одному из разъемов последовательного порта компьютера (обычно СОМ 1). Разъем PS/2 применяют на современных материнских платах, мышь с таким, интерфейсом избавлена от конфликтов с модемами и другими устройствами за прерывания и адреса. Самый современный интерфейс USB, и в перспективе следует ориентироваться на него. Наконец, инфракрасный интерфейс позволяет оставить мышь «без хвоста». Мыши выпускают с тремя или двумя кнопками. Для большинства пользователей достаточно двухкнопочного изделия, так как третья кнопка применяется только изредка в специализированных профессиональных приложениях. Некоторые мыши обзавелись небольшим колесиком, расположенным между клавишами. С помощью его программируемых функций можно выполнять такие дополнительные операции, как, например, управление полосой прокрутки документа Word. Мышь надо подбирать по своей руке и в соответствии с предпочитаемыми приемами работы. Кому-то нравятся легкие и подвижные модели, другим подходят массивные изделия с заметным сопротивлением движению. Так как в процессе работы мышь постоянно бегает по поверхности коврика или стола, она собирает всю пыль и грязь. Поэтому необходимо проверить удобство ее неполной разборки (изъятия шарика) и доступа к механическому приводу для их обслуживания. Оптическая мышь не имеет вращающихся частей и может «ползать» по любой плоской поверхности. Принцип работы ее механизма заключается в непрерывном сканировании световым микроимпульсом подстилающей поверхности, приеме отраженного импульса оптическим детектором и обработке полученных сигналов встроенным цифровым сигнальным процессором. Ввиду отсутствия движущихся частей, мышь является практически «вечной», а ее стоимость относительно невысока. Интерфейсы "Мыши". Мышь является устройством, предназначенным для ввода координат и подачи команд. По интерфейсу с компьютером различают три основ вида мышей: Bus Mouse, Serial Mouse и PS/2 Mouse. С интерфейсами Serial Mouse и PS/2-Mouse иногда возникают сложности. Хотя оба они последовательные, но имеют существенные принципиальные различия в уровнях сигналов, способе синхронизации, частоте и формате посылок. 1. Интерфейс PS/2 использует однополярный сигнал с уровнями ТТЛ, питание мыши – однополярное с напряжением +5 V относительно шины GND. Интерфейс RS-232C, применяемый в Serial Mouse, использует двуполярный сигнал с уровнями срабатывания +3 V и -3 V, и для него требуется двуполярное (относительно шины GND) питание мыши. 2. Интерфейс PS/2 использует две раздельные сигнальные линии, одну для передачи данных, другую — для сигналов синхронизации. Serial Mouse использует асинхрон-ный способ передачи данных всего по одной линии. Даже не рассматривая частоты и форматы посылок, становится ясно, что прямой совместимости между этими интерфейсами быть не может. Тем не менее, выпускаются и продаются переходники (пассивные!), позволяющие выбирать способ подключения мыши. Эти переходники предназначены только для универсальных мышей, у которых встроенный контроллер по напряжению питания способен распознать, к какому интерфейсу его подключили, и установить соответствующий тип своего выходного интерфейса. Универсальные мыши не особо распространены, поэтому часто приходится слышать о неудачных попытках применения таких переходников к обычной мыши Serial Mouse или PS/2-Mouse. Дополнительную путаницу вносят мыши для компьютера Macintosh, которые имеют разъем, с виду напоминающий разъем PS/2. Однако при ближайшем рас-смотрении и неудачной попытке включения его в PC становится ясно, что разъемы эти разные, да и интерфейс совершенно иной. Последовательные мыши – MS Mouse и PC Mouse. Serial Mouse – мышь с последовательным интерфейсом, подключаемая через 9– или 25–контактный разъем СОМ-порта (табл. 1). Таблица 1. Разъемы Serial Mouse
Эта мышь имеет встроенный микроконтроллер, который обрабатывает сигналы от координатных датчиков и кнопок. Каждое событие – перемещение мыши или нажатие-отпускание кнопки кодируется двоичной посылкой по интерфейсу RS-232C. Для передачи информации применяется асинхронная передача, а двуполярное питание, требуемое по протоколу RS-232, обеспечивается от управляющих линий интерфейса. Недостатком Serial Mouse является то, что она занимает СОМ-порт и требует монопольного владения его штатной линии прерывания (IRQ4 для СОМ1 и IRQ3 для COM2). Конечно, то, что для использования мыши порту СОМ1 требуется именно прерывание IRQ4, является недостатком не самой мыши, а ее программного драйвера, но для пользователя, не увлекающегося написанием «мышиных» драйверов, важен только факт этого ограничения. Две основные разновидности – MS Mouse (Microsoft Mouse) и PC Mouse (Mouse Systems Mouse) требуют разных драйверов, многие мыши имеют переключатель MS/PC. Эти два типа «мышей» при одинаковой скорости 1200 бит/с, одном стоп-бите и отсутствии контроля паритета используют различные форматы посылок: 1. MS Mouse: 7 бит данных, трехбайтный пакет (в «классическом» варианте), положительным значениям соответствует перемещение по координате X вправо, а по координате Y вниз. Для трехкнопочных мышей добавляется четвертый байт, передаваемый только при изменении состояния средней кнопки. Для 3D-мыши четвертый байт имеет иное назначение. 2. PC Mouse: 8 бит данных, пятибайтный пакет, положительным значениям соответствует перемещение по координате X вправо, а по координате Y вверх. Из рассмотрения данных форматов становятся понятными беспорядочные перемещения указателя мыши на экране при несоответствии драйвера типу мыши. Несовместимость может проявляться и более неприятным образом: к примеру, ОС Windows 95 при загрузке (и установке) вообще не воспринимает мышь, работающую в режиме PC Mouse. Системная поддержка последовательной мыши осуществляется только на уровне ОС (сервисы вызываются через Int ЗЗh), драйвер мыши – загружаемый или встроенный в ОС. BIOS мышь не поддерживает, даже если и пользуется ею для навигации в BIOS Setup. Еще раз подчеркнем, что для работы мыши обязательно требуется линия аппаратного прерывания — IRQ4 или IRQ3 для последовательных мышей на портах СОМ1 или COM2 соответственно. PS/2-Mouse – мышь, появившаяся с компьютерами PS/2. Ее интерфейс и разъем 6-pin mini-DIN аналогичен клавиатурному и, как правило, реализуется тем же контроллером клавиатуры 8242. Адаптер и разъем PS/ 2-Mouse устанавливаются на многих современных системных платах (рис. 4). Контроллер мыши PS/2 может быть также на карте расширения (ISA) и занимать дополнительные адреса в пространстве ввода-вывода. С мышью PS/2 связь двусторонняя: процессор может посылать контроллеру 8242 специальные команды, но, в отличие от интерфейса клавиатуры, перед записью в порт 60h каждого «мышиного» байта (и команды, и ее параметра) в порт 64h должен записываться код D4h.
Рис. 4. Разъем PS/2-Mouse. Мышь может работать в одном из двух режимов. В потоковом режиме (stream mode) мышь посылает данные по любому изменению состояния; в режиме опроса (remote mode) мышь передает данные только по запросу процессора. Есть еще диагностический режим (wrap mode), в котором мышь возвращает эхом данные, посылаемые ей контроллером. По приему пакета от мыши контроллер устанавливает флаг Mouse_OBF и вырабатывает прерывание IRQ12, если оно не запрещено командным байтом 8242. Устройства–указатели с интерфейсом PS/2 (мышь PS/2) имеют поддержку BIOS, обеспечивающую настройку параметров мыши (посылку вышеперечисленных команд). Собственно драйвер мыши (обработчик прерывания по вектору 74h от запроса IRQ 12), обрабатывающий ее информационные посылки, входит лишь в состав ОС или загружается отдельно. Поддержка мыши вызывается через BIOS Int 15h с кодами функций C200-C209h. Мышь Bus Mouse.Bus Mouse (шинная мышь) – вариант, применявшийся в первых мышах. Здесь мышь содержит только датчики и кнопки, а обработка их сигналов производится на специализированной плате адаптера (обычно ISA). Кабель 9-проводный, разъем специальный (рис. 5), хотя на первый взгляд и напоминающий разъем PS/2-Mouse. Главный недостаток такой системы заключается в том, что адаптер занимает слот системной шины, адреса ввода-вывода и линию запроса прерывания. Иногда встречались мультипортовые карты ISA (COM–, LPT– и GAME–пopты), на которых установлен и адаптер Bus Mouse. Поскольку компания Microsoft одна из первых выпустила такую мышь, снабдив ее своим логотипом, с понятием Bus Mouse иногда отождествляют и MS–Mouse, хотя последние могут иметь любой из трех видов интерфейсов.
Рис. 5. Разъем Bus Mouse
Порядок выполнения работы
1. Используя любую тестовую программу, предназначенную для получения информации о составе, работоспособности системы в целом и отдельных блоков и устройств, входящих в нее (AIDA64, SiSoft Sandra Pro 2001 и т.д.) получить сведения о вычислительной системе на рабочем месте с занесением результатов в таблицу 2. Таблица 2. Общие сведения о системе.
2. Получить информацию о клавиатуре и заполнить таблицу 3. Таблица 3. Сведения о клавиатуре.
3. Получить информацию о мыши и заполнить таблицу 4. Таблица 4. Сведения о мыши.
4. Далее проверить работоспособность клавиатуры и мыши используя программу Norton Diagnostic, входящую в пакет прикладных программ Norton Utilities: – запустить программу Norton Diagnostic; – выбрать пункт Keyboard; – нажимая все клавиши основной клавиатуры, протестировать устройство и составить отчет о результатах; – выбрать пункт keypad; – произвести тестирование, сделать вывод о работоспособности устройства; – выбрать пункт Mouse; – перемещая мышь при нажатых правой и левой клавишах, проверить работоспособность устройства; – произвести профилактическую чистку мыши. 5. Все результаты и выводы отразить в отчете. Контрольные вопросы: 1. Назначение и типы клавиатур, в чем состоит их сходство и различие? 2. Какие функции драйвера клавиатуры? 3. Что такое скан-код? 4. Типы кодов символов? 5. В чем заключается принцип работы клавиатуры? 6. Интерфейсы клавиатуры и их характеристики? 7. Системная поддержка клавиатуры на уровне BIOS? 8. Назначение и типы "мышей", их сходство и различие? 9. Интерфейсы "мыши", и их характеристика? 10. Системная поддержка интерфейсов "мыши"?
Лабораторная работа №2 Тема:Последовательные интерфейсы. Обмен информацией между двумя ЭВМ с использованием стандартных средств Windows. Цель работы:Изучение последовательных интерфейсов. Соединение двух ЭВМ нуль-модемным кабелем через COM-порты и согласование передачи данных с помощью стандартных средств Windows (Hyper Terminal). Теоретические сведения Интерфейс RS-232C предназначен для подключения аппаратуры, передающей или принимающей данные (ООД – оконечное оборудование данных; DTE – Data Terminal Equipment), к оконечной аппаратуре каналов данных (АКД; DСЕ – Data Communication Equipment). В роли ООД может выступать компьютер, принтер, плоттер и другое периферийное оборудование. В роли АКД обычно выступает модем. Конечной целью подключения является соединение двух устройств ООД. Полная схема соединения приведена на рис. 6.
Рис. 6. Полная схема соединения по RS-232C. Стандарт описывает управляющие сигналы интерфейса, пересылку данных, электрический интерфейс и типы разъемов. В стандарте предусмотрены асинхронный и синхронный режимы обмена. СОМ-порты поддерживают только асинхронный режим. СОМ-порт (Communications Port – коммуникационный порт) присутствует в PC начиная с первых моделей. Этот порт обеспечивает асинхронный обмен по стандарту RS-232C. СОМ-порты реализуются на микросхемах универсальных асинхронных приемопередатчиков (UART), совместимых с семейством 18250/16450/16550. Они занимают в пространстве ввода-вывода по 8 смежных 8-битных регистров и могут располагаться по стандартным базовым адресам 3F8h (COM1), 2F8h (COM2), 3E8h (COM3), 2E8h (COM4). Порты могут вырабатывать аппаратные прерывания IRQ4 (обычно используются для СОМ1 и COM3) и IRQ3 (для COM2 и COM4). С внешней стороны порты имеют линии последовательных данных передачи и приема, а также набор сигналов управления и состояния, соответствующий стандарту RS-232C. СОМ-порты имеют внешние разъемы-вилки DB25P или DB9P, выведенные на заднюю панель компьютера. Характерной особенностью интерфейса является применение «не ТТЛ» сигналов — все внешние сигналы порта двуполярные. Гальваническая развязка отсутствует — схемная земля подключаемого устройства соединяется со схемной землей компьютера. Скорость передачи данных может достигать 115 200 бит/с. Компьютер может иметь до четырех последовательных портов СОМ 1-COM4 (для машин класса AT типично наличие двух портов) с поддержкой на уровне BIOS. Сервис BIOS Int 14h обеспечивает инициализацию порта, ввод и вывод символа и опрос состояния. Через Int 14h скорость передачи программируется в диапазоне 110-9600 бит/с (меньше, чем реальные возможности порта). Для повышения производительности широко используется взаимодействие программ с портом на уровне регистров, для чего требуется совместимость аппаратных средств СОМ-порта с программной моделью 58250/16450/16550. Название порта указывает на его основное назначение — подключение коммуникационного оборудования (например, модема) для связи с другими компьютерами, сетями и периферийными устройствами. Практически все современные системные платы (еще начиная с PCI-плат для процессоров 486) имеют встроенные адаптеры двух СОМ-портов. Один из портов может использоваться и для беспроводной инфракрасной связи с периферийными устройствами (IrDA). Существуют карты ISA с парой СОМ-портов, где они чаще всего соседствуют с LPT-портом, а также с контроллерами дисковых интерфейсов (FDC+IDE). Если возникает потребность в большом количестве последовательных интерфейсов, то в ПК можно установить специальные адаптеры-мультиплексоры. Это весьма дорогие карты, они выпускаются обычно на 4,8,12 и даже 16 портов. Такое большое число разъемов на заднюю стенку ПК вывести проблематично, и у мультиплексоров обычно имеется внешний блок с разъемами (и электроникой), соединяемый с адаптером кабелем с многоконтактными разъемами. BIOS мультиплексоры не поддерживает. «Классический» СОМ-порт позволял осуществлять обмен данными только программно-управляемым способом, при этом для пересылки каждого байта процессору приходится выполнять несколько инструкций. Современные порты имеют FIFO-буферы данных и позволяют выполнять обмен по каналу DMA, существенно разгружая центральный процессор, что особенно важно на больших скоростях обмена. Интерфейс позволяет исключить канал удаленной связи вместе с парой устройств АКД, соединив устройства непосредственно с помощью нуль-модемного кабеля (рис. 7).
Рис. 7. Соединение по RS-232C нуль-модемным кабелем. Стандарт RS-232C описывает несимметричные передатчики и приемники – сигнал передается относительно общего провода – схемной земли. Логической единице соответствует напряжение на входе приемника в диапазоне от -12 до -3 V. Для линий управляющих сигналов это состояние называется ON («включено»), для линий последовательных данных – MARK. Логическому нулю соответствует диапазон от +3 до +12 V. Для линий управляющих сигналов состояние называется OFF («выключено»), а для линий последовательных данных – SPACE. Диапазон от -3 до +3 V – зона нечувствительности, обусловливающая гистерезис приемника: состояние линии будет считаться измененным только после пересечения порога (рис. 8). Уровни сигналов на выходах передатчиков должны быть в диапазонах от -12 до -5 V и от +5 до +12 V для представления единицы и нуля соответственно. Разность потенциалов между схемными землями (SG) соединяемых устройств должна быть менее 2 V, при более высокой разности потенциалов возможно неверное восприятие сигналов.
Рис. 8. Уровни сигналов интерфейса RS-232C. Интерфейс предполагает наличие защитного заземления для соединяемых устройств, если они оба питаются от сети переменного тока и имеют сетевые фильтры. Подключение и отключение интерфейсных кабелей устройств с автономным питанием должно производиться при отключенном питании. Иначе разность невыровненных потенциалов устройств в момент коммутации может оказаться приложенной к выходным или входным (что опаснее) цепям интерфейса и вывести из строя микросхемы. Стандарт RS-232C регламентирует типы применяемых разъемов. На аппаратуре ООД принято устанавливать вилки DB-25P или более компактный вариант – DB-9P. Девятиштырьковые разъемы не имеют контактов для дополнительных сигналов, необходимых для синхронного режима (в большинстве 25-штырьковых разъемах эти контакты не используются). На аппаратуре АКД (модемах) устанавливают розетки DB-25S или DB-9S. Переходные кабели могут являться и переходниками с 9 на 25-штырьковые разъемы (рис. 9).
Рис. 9. Кабели подключения модемов Если аппаратура ООД соединяется без модемов, то разъемы устройств (вилки) соединяются между собой нуль-модемным кабелем (Zero-modem или Z-modem), имеющим на обоих концах розетки, контакты которых соединяются перекрестно по одной из схем, приведенных на рис. 10.
Рис. 10. Нуль-модемный кабель: а – минимальный, б – полный. Последовательность управляющих сигналов при подключения модема к СОМ-порту иллюстрирует рис. 11.
Рис. 11. Последовательность управляющих сигналов интерфейса RS-232C. 1. Установкой DTR компьютер указывает на желание использовать модем. 2. Установкой DSR модем сигнализирует о своей готовности и установлении соединения. 3. Сигналом RTS компьютер запрашивает разрешение на передачу и заявляет о своей готовности принимать данные от модема. 4. Сигналом CTS модем уведомляет о своей готовности к приему данных от компьютера и передаче их в линию. 5. Снятием CTS модем сигнализирует о невозможности дальнейшего приема (например, буфер заполнен) – компьютер должен приостановить передачу данных. 6. Сигналом CTS модем разрешает компьютеру продолжить передачу (в буфере появилось место). 7. Снятие RTS может означать как заполнение буфера компьютера (модем должен приостановить передачу данных в компьютер), так и отсутствие данных для передачи в модем. Обычно в этом случае модем прекращает пересылку данных в компьютер. 8. Модем подтверждает снятие RTS сбросом CTS. 9. Компьютер повторно устанавливает RTS для возобновления передачи. 10. Модем подтверждает готовность к этим действиям. 11. Компьютер указывает на завершение обмена. 12. Модем отвечает подтверждением. 13. Компьютер снимает DTR, что обычно является сигналом на разрыв соединения («повесить трубку»). 14. Модем сбросом DSR сигнализирует о разрыве соединения. Из рассмотрения этой последовательности становятся понятными соединения DTR-DSR и RTS-CTS в нуль-модемных кабелях. В табл. 5 приведено назначение контактов разъемов СОМ-портов (и любой другой аппаратуры передачи данных. У модемов (АКД) название цепей и контактов такое же, но роли сигналов (вход-выход) меняются на противоположные. Таблица 5. Разъемы и сигналы интерфейса RS-232C
Таблица 5. Разъемы и сигналы интерфейса RS-232C (продолжение)
Порядок выполнения работы 1. Соединить два выключенных компьютера при помощи нуль-модемного кабеля и включить их. 2. Запустить программу Пуск -> Программы -> Стандартные -> Связь -> Hyper Terminal. Во всплывшем окне "Описание подключения" ввести название подключения и выбрать его графическое обозначение (значок) рис. 12.
Рис. 12. Название подключения и его обозначение. 3. Для корректной передачи данных произвести настройки программы в соответствии с рисунками 13, 14, 15. Причем настройки гипертерминалов на обоих компьютерах должны быть идентичны.
Рис. 13. Параметры СОМ-портов.
Рис. 14. Свойства соединения.
Рис. 15. Параметры ASCII. 4. После настройки параметров программы необходимо приступить к передаче информации. Для передачи текстовой информации от одной ЭВМ к другой, необходимо в главном окне терминала напечатать текст, который должен одновременно отображаться на терминале второй ЭВМ (рис. 16).
Рис. 16. Отображение текстовой информации. 5. Для передачи файла от одной ЭВМ к другой, необходимо в главном окне терминала выбрать пункт меню Передача -> файл, или нажать на соответствующую пиктограмму на панели быстрого доступа. В открывшемся окне необходимо указать путь к файлу (рис. 17) и подтвердить передачу, после чего начнется передача файла (рис. 18).
Рис. 17. Выбор файла для передачи.
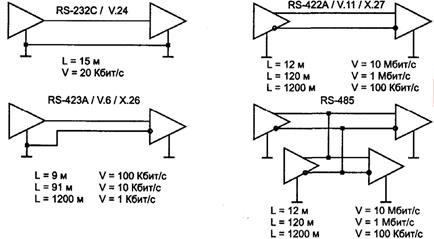
Рис. 18. Параметры передачи файла. Контрольные вопросы: 1. Назначения и основные параметры стандартного интерфейса RS-232C ? 2. Приведите полную схему соединения по RS-232C? 3. Перечислите назначения и основные параметры СОМ-порта? 4. Приведите схему соединение устройств с помощью нуль-модемного кабеля? 5. Электрические параметры RS-232С? 6. Типы применяемых разъемов для стандарта RS-232C? 7. Последовательность управляющих сигналов при соединение ЭВМ и модема через СОМ-порт? 8. Назначение контактов разъемов СОМ-портов? Лабораторная работа №3 Тема:Последовательные интерфейсы. Обмен информацией между двумя ЭВМ через COM-порт с использованием стороннего приложения. Цель работы:Изучение последовательных интерфейсов. Соединение двух ЭВМ нуль-модемным кабелем через COM-порты и согласование передачи данных с помощью приложения, написанного на языке высокого уровня Delphi. Теоретические сведения Интерфейсы семейства RS.В последовательном интерфейсе далеко не всегда используют двуполярные сигналы RS-232C – это неудобно, хотя бы из-за необходимости использования двуполярного питания приемопередатчиков. Сами микросхемы вышеописанных приемопередатчиков UART работают с сигналами логики ТТЛ или КМОП; такие же сигналы используются, например, и в сервисных портах винчестеров и других устройств. Многие устройства (в том числе карманные ПК и мобильные телефоны) имеют внешний последовательный интерфейс с уровнями низковольтной логики. Конечно, сигналы обычной логики не имеют столь высокой помехоустойчивости, как RS-232C, но не всегда это и требуется. Для взаимного преобразования уровней интерфейса RS-232C и логики специально выпускаются буферные микросхемы приемников (с гистерезисом) и передатчиков двуполярного сигнала. При несоблюдении правил заземления и коммутации они обычно первыми выходят из строя. Часто буферные схемы входят прямо в состав интерфейсных БИС. Это удешевляет изделие, экономит место на плате, но в случае аварии оборачивается крупными финансовыми потерями. Когда требуется большая помехоустойчивость (дальность и скорость передачи), применяют иные электрические варианты последовательных интерфейсов: RS-422A (V.11, Х.27), RS-423A (V.10, Х.26), RS-485. На рис. 19 приведены схемы соединения приемников и передатчиков, а также показаны ограничения на длину линии (L) и максимальную скорость передачи данных (V). Несимметричные линии интерфейсов RS-232C и RS-423A имеют самую низкую защищенность от синфазной помехи, хотя дифференциальный вход приемника RS-423A позволяет в какой-то мере исправить ситуацию. Лучшие параметры имеют интерфейсы RS-422A и RS-485, работающие на симметричных линиях связи. В них для передачи каждого сигнала используются дифференциальные приемопередатчики с отдельной (витой) парой проводов для каждой сигнальной цепи.
Рис. 19 Стандарты последовательных интерфейсов Интерфейсы RS-422 и RS-485 используют симметричную передачу сигнала и допускают как двухточечную, так и шинную топологию соединений. В них информативной является разность потенциалов между проводниками А и В. Если на входе приемника UA-UB>0,2 V (А положительнее В) – состояние «выключено» (space), UA-UB<-0,2 V (А отрицательнее В) – состояние «включено» (mark). Диапазон |UA-UB|<0,2 V является зоной нечувствительности (гистерезис), защищающей от воздействия помех. На выходах передатчика сигналы UA и UB обычно переключаются между уровнями 0 и +5 V (КМОП) или +1 и +4 V (ТТЛ), дифференциальное выходное напряжение должно лежать в диапазоне 1,5-5 V. Выходное сопротивление передатчиков 100 Ом. Интерфейсы электрически совместимы между собой, хотя и имеют некоторые различия в ограничениях. Принципиальное отличие передатчиков RS-485 – возможность переключения в третье состояние. Передатчики RS-422/485 совместимы с приемниками RS-423. Топологию соединений иллюстрирует рис. 20.
Рис. 20. Топология интерфейсов: а – RS-422, б – RS-485 четырехпроводный, в – RS-485 двухпроводный. Чтобы увеличить число узлов, можно повысить входное сопротивление приемников, но при этом снижается допустимая скорость или максимально возможная дальность передачи. Максимальная скорость передачи на коротких расстояниях (до 10м) ограничивается быстродействием передатчиков (достижима частота 25 МГц). На средних расстояниях ограничение определяется емкостью кабеля (1200 бит/с – 25 нФ, 9600 бит/с – 30 нФ, 115 кбит/с – 250 пФ). Максимальная дальность (1200 м) ограничена сопротивлением петли постоянному току. Интерфейс RS-485 может быть в двух версиях: двухпроводной и четырехпроводной. Четырехпроводная версия (рис. 20, б) выделяет задающий узел (master), передатчик которого работает на приемники всех остальных. Передатчик задающего узла всегда активен – переход в третье состояние ему не нужен. Передатчики остальных ведомых (slave) узлов должны иметь тристабильные выходы, они объединяются на общей шине с приемником ведущего узла. В двухпроводной версии (рис. 20, в) все узлы равноправны. Для определенности состояния покоя шины RS-485, когда нет активных передатчиков, на линию устанавливают активные терминаторы, «растягивающие» потенциалы проводов. В покое провод В должен иметь более положительный потенциал, чем А. При многоточечном соединении необходимо организовать метод доступа к среде передачи. Чаще всего используют полинг (polling) – опрос готовности к передаче, выполняемый ведущим устройством, или передачу права доступа в соответствии с определенным (установленным) регламентом. Иногда используют и методы случайного доступа (аналогично Ethernet). Дифференциальный вход интерфейсов защищает от действия помех, но при этом должно осуществляться соединение «схемных земель» устройств между собой и с шиной заземления. Для соединения устройств между собой используют третий провод интерфейса (можно и экран). Для того чтобы по третьему проводу не протекал большой ток, выравнивающий «земляные потенциалы», в его цепь включают резисторы (рис.21).
Рис. 21. Соединение «схемных земель» для интерфейсов RS-422 и RS-485. Интерфейс «токовая петля»для представления сигнала использует не напряжение, а ток в двухпроводной линии, соединяющей приемник и передатчик. Логической единице (состоянию «включено») соответствует протекание тока 20 мА, а логическому нулю – отсутствие тока. Такое представление сигналов для вышеописанного формата асинхронной посылки позволяет обнаружить обрыв линии – приемник заметит отсутствие стоп-бита (обрыв линии действует как постоянный логический нуль). Токовая петля с гальванической развязкой позволяет передавать сигналы на расстояния до нескольких километров, но при невысоких скоростях (выше 19 200 бит/с не используют, а на километровых расстояниях допустима скорость до 9600 бит/с и ниже). Допустимое расстояние определяется сопротивлением пары проводов и уровнем помех. Поскольку интерфейс требует пары проводов для каждого сигнала, обычно используют только два сигнала последовательного интерфейса (4-проводная линия). В случае двунаправленного обмена применяются только сигналы передаваемых и принимаемых данных, а для управления потоком используется программный метод XON/XOFF. Если двунаправленный обмен не требуется, применяют одну линию данных, а для управления потоком обратная линия задействуется для сигнала CTS (аппаратный протокол) или встречной линии данных (программный протокол). При надлежащем ПО одной токовой петлей можно обеспечить двунаправленную полудуплексную связь двух устройств. При этом каждый приемник «слышит» как сигналы передатчика на противоположной стороне канала, так и сигналы своего передатчика. Они расцениваются коммуникационными пакетами просто как эхо-сигнал. Для безошибочного приема передатчики должны работать поочередно. Токовая петля позволяет использовать выделенные физические линии без модемов, но на малых скоростях. Иногда по токовой петле подключают терминалы с интерфейсом RS-232C, если не хватает штатной длины интерфейса или требуется гальваническая развязка. Преобразовать сигналы RS-232C в токовую петлю несложно – на рис. 22 приведена простейшая схема преобразователя применительно к подключению терминала. Для получения двуполярного сигнала, требуемого для входных сигналов СОМ-порта, применяется питание от интерфейса.
Рис. 22. Преобразование интерфейса RS-232C в «токовую петлю» Асинхронный режим передачи является байт-ориентированным (символьно-ориентированным): минимальная пересылаемая единица информации – один байт (один символ). Формат посылки байта иллюстрирует рис. 23.
Рис. 23. Формат асинхронной передачи RS-232C. Передача каждого байта начинается со старт-бита, сигнализирующего приемнику о начале посылки, за которым следуют биты данных и, возможно, бит паритета (четности). Завершает посылку стоп-бит, гарантирующий паузу между посылками. Старт-бит следующего байта посылается в любой момент после стоп-бита, то есть между передачами возможны паузы произвольной длительности. Старт-бит, имеющий всегда строго определенное значение (логический 0), обеспечивает простой механизм синхронизации приемника по сигналу от передатчика. Подразумевается, что приемник и передатчик работают на одной скорости обмена. Внутренний генератор синхронизации приемника использует счетчик-делитель опорной частоты, обнуляемый в момент приема начала старт-бита. Этот счетчик генерирует внутренние стробы, по которым приемник фиксирует последующие принимаемые биты. В идеале стробы располагаются в середине битовых интервалов, что позволяет принимать данные и при незначительном рассогласовании скоростей приемника и передатчика. Очевидно, что при передаче 8 бит данных, одного контрольного и одного стоп-бита предельно допустимое рассогласование скоростей, при котором данные будут распознаны, верно, не может превышать 5%. С учетом фазовых искажений и дискретности работы внутреннего счетчика синхронизации реально допустимо меньшее отклонение частот. Чем меньше коэффициент деления опорной частоты внутреннего генератора (чем выше частота передачи), тем больше погрешность привязки стробов к середине битового интервала, и требования к согласованности частот становятся более строгие. Чем выше частота передачи, тем больше влияние искажений фронтов на фазу принимаемого сигнала. Взаимодействие этих факторов приводит к повышению требований к согласованности частот приемника и передатчика с ростом частоты обмена. Формат асинхронной посылки позволяет выявлять возможные ошибки передачи: 1. Если принят перепад, сигнализирующий о начале посылки, а по стробу старт-бита зафиксирован уровень логической единицы, старт-бит считается ложным и приемник снова переходит в состояние ожидания. Об этой ошибке приемник может не сообщать. 2. Если во время, отведенное под стоп-бит, обнаружен уровень логического нуля, фиксируется ошибка стоп-бита. 3. Если применяется контроль четности, то после посылки бит данных передается контрольный бит. Этот бит дополняет количество единичных бит данных до четного или нечетного в зависимости от принятого соглашения. Прием байта с неверным значением контрольного бита приводит к фиксации ошибки. 4. Контроль формата позволяет обнаруживать обрыв линии: как правило, при обрыве приемник «видит» логический нуль, который сначала трактуется как старт-бит и нулевые биты данных, но потом срабатывает контроль стоп-бита. Для асинхронного режима принят ряд стандартных скоростей обмена: 50, 75, 110, 150, 300, 600, 1200, 2400, 4800, 9600, 19200, 38400, 57600 и 115200 бит/с. Для управления потоком данных (Flow Control) могут использоваться два варианта протокола – аппаратный и программный. Аппаратный протокол управления потоком RTS/CTS (hardware flow control) – использует сигнал CТS, который позволяет остановить передачу данных, если приемник не готов к их приему (рис. 24).
Рис. 24. Аппаратное управление потоком
Передатчик «выпускает» очередной байт только при включенной линии CTS. Байт, который уже начал передаваться, задержать сигналом CTS невозможно (это гарантирует целостность посылки). Аппаратный протокол обеспечивает самую быструю реакцию передатчика на состояние приемника. Микросхемы асинхронных приемопередатчиков имеют не менее двух регистров в приемной части – сдвигающий, для приема очередной посылки, и хранящий, из которого считывается принятый байт. Это позволяет реализовать обмен по аппаратному протоколу без потери данных. Аппаратный протокол удобно использовать при подключении принтеров и плоттеров, если они его поддерживают. При непосредственном (без модемов) соединении двух компьютеров аппаратный протокол требует перекрестного соединения линий RTS – CTS. Применяемые в IBM PC приемопередатчики 8250/16450/16550 сигнал CTS аппаратно не отрабатывают, а только показывают его состояние в регистре MSR. Реализация протокола RTS/CTS возлагается на драйвер BIOS Int 14h, и называть его «аппаратным» не совсем корректно. Если же программа, пользующаяся СОМ-портом, взаимодействует с UART на уровне регистров (а не через BIOS), то обработкой сигнала CTS для поддержки данного протокола она занимается сама. Поэтому преимущество протокола RTS/CTS во времени реакции (по сравнению с программным методом XON/XOFF) остается лишь для буферированной (в режиме FIFO) передачи. Программный протокол управления потоком XON/XOFF предполагает наличие двунаправленного канала передачи данных. Работает протокол следующим образом: если устройство, принимающее данные, обнаруживает причины, по которым оно не может их дальше принимать, оно по обратному последовательному каналу посылает байт-символ XOFF (13h). Противоположное устройство, приняв этот символ, приостанавливает передачу. Когда принимающее устройство снова становится готовым к приему данных, оно посылает символ XON (llh), приняв который противоположное устройство возобновляет передачу. Время реакции передатчика на изменение состояния приемника по сравнению с аппаратным протоколом увеличивается, по крайней мере, на время передачи символа (XON или XOFF) плюс время реакции программы передатчика на прием символа (рис. 25). Из этого следует, что данные без потерь могут приниматься только приемником, имеющим дополнительный буфер принимаемых данных и сигнализирующим о неготовности заблаговременно (имея в буфере свободное место).
Рис. 25. Программное управление потоком XON/XOFF Преимущество программного протокола заключается в отсутствии необходимости передачи управляющих сигналов интерфейса – минимальный кабель для двустороннего обмена может иметь только 3 провода. Недостатком, помимо обязательного наличия буфера и большего времени реакции (снижающего общую производительность канала из-за ожидания сигнала XON), является сложность реализации полнодуплексного режима обмена. В этом случае из потока принимаемых данных должны выделяться (и обрабатываться) символы управления потоком, что ограничивает набор передаваемых символов. Микросхемы асинхронных приемопередатчиков. В СОМ-портах преобразование параллельного кода в последовательный для передачи и обратное преобразование при приеме данных выполняют специализированные микросхемы UART (Universal Asynchronous Receiver–Transmitter – универсальный асинхронный приемопередатчик). Эти же микросхемы формируют и обрабатывают управляющие сигналы интерфейса. СОМ-порты IBM PC XT/AT базируются на микросхемах, совместимых на уровне регистров с UART i8250 – 8250/16450/16550А. Это семейство представляет собой усовершенствование начальной модели, направленное на повышение быстродействия, снижение потребляемой мощности и загрузки процессора при интенсивном обмене. Микросхемы 8250 имеют невысокое быстродействие по обращениям со стороны системной шины. 16550А – имеет работающие 16-байтные FIFO-буферы приема и передачи и возможность использования DMA. Именно этот тип UART должен применяться в AT при интенсивных обменах на скоростях 9600 бит/с и выше. Совместимость с этой микросхемой обеспечивает большинство микросхем контроллеров портов ввода-вывода, входящих в современные чипсеты. Микросхемы UART 16550А с программной точки зрения представляют собой набор регистров, доступ к которым определяется адресом (смещением адреса регистра относительно базового адреса порта) и значением бита DLAB (бита 7 регистра LCR). В адресном пространстве микросхема занимает 8 смежных адресов. Микросхемы 8250 отличаются отсутствием регистра FCR и всех возможностей FIFO и DMA. С |